, j4 v6 Q: C* k2 | 01 什么是遥感数据
+ y4 H# Z5 i. [0 u- T 遥感(remote sensing)是指非接触的,远距离的探测技术。一般指运用传感器/遥感器对物体的电磁波的辐射、反射特性的探测。
8 u8 I, k4 D+ h9 y 作为一种重要的对地观测技术,它为我们研究和理解地球表面提供了主要的数据来源。 3 ]7 l, N5 k' C, H
目前遥感数据呈现出高中低分辨率、多光谱、高光谱、SAR、街景及LiDAR激光点云等多源数据共存的情况,为遥感监测及其他多领域应用提供了基本数据保障。 5 ]1 l+ K# u! a
它们是如何产生的呢?
. p( X8 ^- T$ w% A 02 遥感数据的采集方式
% I8 }" [/ J% w* T 获取遥感数据的装备主要包括遥感平台和传感器。根据遥感平台的高度,可将遥感技术划分为航天遥感、航空遥感以及地面遥感。[2] / }2 L! v2 [8 A% y; r% Q9 c+ O+ m. {
1. 航天遥感 7 l1 A. `; u1 L9 P! \% M/ f1 }
以载人飞船、太空站、人造卫星等各种太空飞行器为平台,搭载照相机、多谱段扫描仪、合成孔径雷达等传感器的遥感技术系统。
% Q* Q' z( s6 x- X3 L& g 2. 航空遥感 % T/ K+ X6 i. u8 `! h1 T k2 @
利用飞艇、飞机、气球等平台完成对地观测任务的遥感技术系统。
$ h; A( [% _( O- O6 w) F 3. 地面遥感
. m2 n# _* \* h3 p% @6 g& z4 | 将地物波谱仪或各种传感器安装在船、车、高塔等平台上的遥感技术系统;比如我们上一期提到的[激光雷达(LiDAR)点云数据知多少?]。 ( {! q7 ~! m+ e, V
传感器方面,可利用可见光、红外线、微波等探测仪器,通过摄影扫描、信息感应、传输和处理等,来识别地面物体的性质和运动状态。
' W1 K m% s! V 03 遥感数据特点
$ U& `( Z# G1 ~( [/ u 遥感数据主要有如下特点: 6 M0 s6 S4 Y2 h; J5 o0 v
● 感测范围大,具有综合、宏观的特点;
0 v6 d8 H" p, K% @1 @ ● 信息量大,具有手段多、技术先进的特点; ' m6 d7 \ F9 q( ?
● 获取信息快,更新周期短,具有动态监测的特点; : S' F q- y$ w; f
● 用途广、效益高。[3]
% i7 v2 K/ J0 r- W 随着遥感技术的进步,获取的数据精度越来越大,达到亚米级别,人工识别已不能满足需求,智能提取技术正在快速发展。
6 w, I% c- n* H7 m! A4 M7 i, e 遥感和人工智能的结合,可以实现更大范围、更加丰富、更加精细的多种地表的时空要素信息,而这些信息可以给广泛的应用行业提供了赋能可能性。 f) i. q7 `1 L; C- z- C! h. P
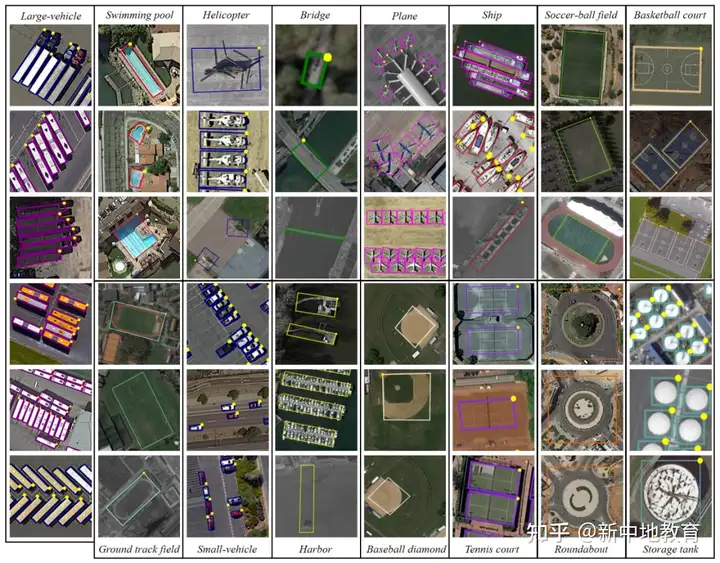
DOTA数据集样本预览(图源:网络)从深度学习角度来看,遥感数据还存在以下几个问题:
+ e) O- j! f j ]" S 1. 原始高分辨率遥感图像难以获取。 : i: R7 O! U$ x9 f* [ k7 |% J$ s& }
对于光学遥感数据集来说,由于遥感图像采集过程中大气扰动、噪声、传感器抖动等因素的影响,使获取的数据存在不确定性等影响,真实的高分辨率图像难以获得。 % d# d8 q6 N: T! X4 o9 J
2. 遥感图像较自然图像,细节丢失更为严重。 ' y4 w N- X( n+ c# b, B0 |
通常,光学遥感图像单个像素所代表的实际距离超过5m,导致图像中细节损失,重建困难。
3 r8 ?; Q. |0 u v% S 3. 遥感图像场景内容差异较大。
" ^% c0 w6 T7 F 遥感拍摄往往涉及到多种地貌,因此会拍摄到多种场景内容,导致样本的多样性。因此,遥感数据集对于单个场景的贡献也被削弱。
N4 p- Z3 f7 z 4. 遥感图像同一场景下,目标物空间大小差异较大。 * v, s( r: C$ b) b: [% Q$ C2 T
在一幅遥感图像中往往包含多个目标,且这些目标物的尺寸大小都不相同,如在街道场景中车辆可能只占了几个像素,房屋占了几百个像素,在卷积的过程中,可能丢失小目标的特征,从而影响SR结果的准确性。 8 I% s% C( J, J0 F3 E) {/ T
那目前遥感领域常见的任务类型有哪些呢? ! ?# g2 v* P6 B0 }1 h/ @9 M
04 基于深度学习的遥感信息提取的任务类型
4 U+ I3 c# C W, J5 X; c 1. 遥感图像的目标检测 9 E7 z! b$ M# T8 ]0 K6 d% `
将深度神经网络应用于遥感图像的目标检测,增强了算法图像纹理感知能力和目标变化适应能力,在检测性能上有了较大的提升,且可用于检测复杂物体。
! n' x: [$ w4 W# S' M2 w 但该方法仍受限于图像分辨率、天气和计算能力等因素,提高其对外界环境的适应性仍是研究的难点。 1 v/ O1 t. J7 r( @+ G+ f; h3 k
2. 遥感地物分割 7 G b* f& }8 ]
遥感图像分割是基于地理对象进行图像分析的关键和重要步骤, 在遥感图像中,它通常被视为景观变化检测和土地利用/覆被分类的辅助手段,可通过输入卫星遥感影像,自动识别道路、河流、庄稼、 建筑物等,并且对图像中的每个像素进行标注。
6 T/ `6 \2 H- W9 n 3. 遥感变化检测 ' v- d, B% t' p ]
变化检测是对地物或现象进行多次观测从而识别其状态变化的过程, 实时检测地表变化信息。目前,遥感变化检测技术已成功应用于环境保护、城市规划、军事侦察等领域 。 % u! }# i3 ~' b. i6 L4 j+ w
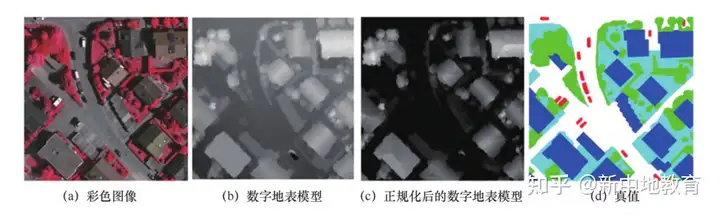
基于神经网络的遥感图像分割结果(图源:参考资料[2])那遥感数据可以用来干什么?
' Z# n1 {: C# c6 l, E. p 05
, g9 U. I2 q; ~. | 遥感数据的应用方向
. a f( d7 W$ f' ?, r6 [ |1 ?1 b 遥感技术广泛用于军事侦察、导弹预警、军事测绘、海洋监视、气象观测等;
. }4 y% F. I( g' o4 t }1 U& K 在民用方面,遥感技术广泛用于地球资源普查、植被分类、土地利用规划、农作物病虫害和作物产量调查、环境污染监测、海洋研制、地震监测、城市土地/建筑规划、地形图更新等方面。 4 g6 z8 N, b& F8 J
06 * p8 I8 d# G+ R1 s
遥感数据集资源
/ h; R( q: @; B' r; [5 V' L* j OpenDataLab平台已经上架了系列经典的遥感数据集,并且对DOTA V2.0数据集进行了标准化,不仅提供了丰富的数据集信息、流畅的下载速度,还统一了脚本格式,免去大家处理数据格式的麻烦,快来体验吧!
8 {+ `9 X4 [2 K B$ N · DOTA V2.0
0 V) s% e. @" P4 d7 x" `8 Q https://opendatalab.com/91
* b. F1 k6 |) i. ] · DOTA V1.5 " f( c4 a) e: v5 ^: V2 ~& |
https://opendatalab.com/90 ; t% d& ?8 _$ P z% K/ |
· DOTA V1.0
5 O* @. e1 l V; P; v& Q4 w, m1 N" d- G https://opendatalab.com/89 - v3 x. Y2 P, a! V$ a
· UCAS-AOD + K2 i" X C* a# }, L
https://opendatalab.com/102
) @, X7 j2 E" k7 { W" @) T: ? · xBD
' O: p" x1 B1 b' `! A https://opendatalab.com/94
+ I/ k, o* E" d) ?% i% ~ 参考资料: 0 q/ Z* K7 H* J
[1]https://mp.weixin.qq.com/s/pCJsEuQ5gKTwVudMWjfTpw 6 w$ ]0 r! U1 i+ x% V
[2]刘伟权,王程,臧彧,胡倩,于尚书,赖柏锜. 基于遥感大数据的信息提取技术综述[J]. 大数据,2022,8(02):28-57.
5 y* l# I, ^4 v) c- w- J5 Z [3]李正,刘薇,张凯兵. 基于机器学习的遥感图像超分辨综述[J]. 计算机工程与应用,2021,57(13):8-17. 来源:OpenDataLab,作者:专注于AI 数据遥感地信考研书籍介绍:4 w% l' ^4 |, G
6 e- v/ o) O, \: d( i) v! _+ P8 Z$ @7 K 点下方可免费获取地信遥感考研资料 ( q' e9 f0 [! n+ X# h
7 T0 Q* `* W2 d9 b8 I7 K9 z V % I1 N& F. N# j3 f7 o
7 B9 p J5 l0 o. L0 L$ ~9 F) ` 广告 " j, B* k- H; X8 A8 ^/ O
, O! f, n6 y) `' {
" Y& J6 b- t$ |9 f) k. u 点我可免费咨询$ w- R+ [: Q9 T P" A' W' A' k
可获取免费资料 ' N ^1 u+ S* h# M3 \' o8 C7 m% X4 [+ _' P
- W( L8 P8 t" o/ T. w5 s
9 o! _5 h5 F: B1 c 9 y. g: _1 a: ?# H& r7 o
' G$ ?! Q6 o. b" _5 D8 B ! @: w! s2 E7 g8 I
" _0 e) C% U( _$ l" A
# M ~1 A; C% q& P) T5 S) g& S
$ E# e! P; F6 Z' u: t! x: V; I& f
+ C; W" d8 I( A/ z7 q: t3 G
|