|
7 M: a, T3 ~$ v/ n' z3 Q7 v
9 \! W+ q1 N3 @2 B+ e5 r( ~( [2 V5 e
点击图片上方蓝色字体“慧天地”即可订阅 % h2 |( t1 C4 J

# C8 i" ^6 L) t0 @ 
! n5 V* l8 W( O( H `7 F
深海探测技术研发和展望 # G6 }: T2 D. `- E% M: X

9 Z& g- V) r8 O1 W, n( K
《海洋开发与管理》2019年第4期
* m- D y9 @4 q2 o- _ 
; r6 b$ T1 ~- a' s$ Y, J 摘要:深海探测是人类实现可持续发展的战略途径和重要手段。为加快我国开发利用深海资源的进程,文章系统梳理深海探测技术及其研发,分析关键性深海探测技术,并提出深海探测技术的发展趋势。研究结果表明:全球积极研发深海探测技术,主要包括载人潜水器等深海运载器探测技术,声学、光学、电磁学和热学等深海传感探测技术以及生物、海水和岩芯等深海取样探测技术;我国也取得一系列研究成果,但技术水平和产业化水平总体较落后;精确、可靠和高效深海探测的关键性技术主要包括深海光学通信技术、深海导航定位技术、深海动力能源技术和深海装备材料技术,亟须技术攻关;未来深海探测技术将向体系化、协同化和智能化方向发展。
7 Y+ L$ c: T& R 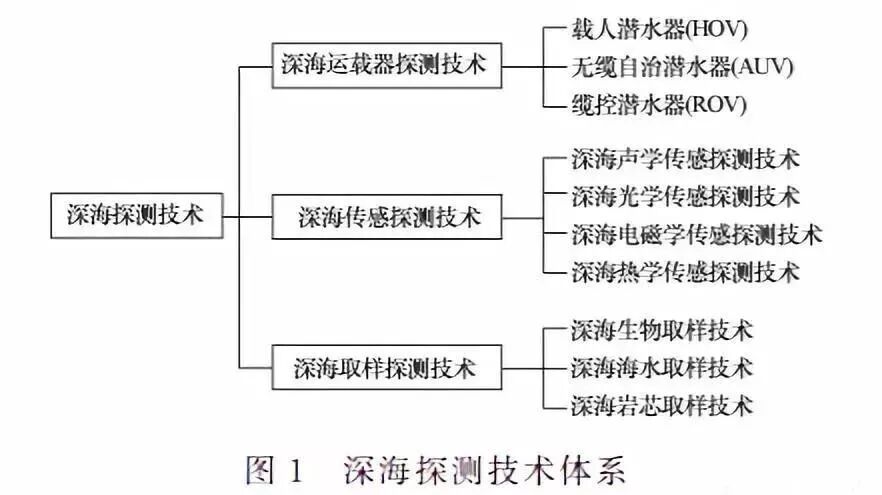
4 {. Z/ A2 ~0 ]8 r/ l; ^* Z+ { 海洋是人类生命的起源,以其丰富的水体资源、矿产资源和生物资源支撑人类的永续发展。由于深海具有可视性差、水压力大和地形复杂等特殊属性,人类对于深海的认知严重不足。随着我国对自然资源实施战略规划和统一管理,我国致力于全面发展深海探测技术,提高对深海的科学认知,为实现可持续发展目标打下坚实基础。 - x( ?3 G7 H" h: ?) W& B
一、深海探测技术及其研发 ! L' Q' Q/ M- j/ @. X4 i( O7 C2 ?2 ~
深海探测技术特指在深海领域通过传感或取样手段获取海洋或海底特定地区单一时刻数据的技术(图1)。 # ?6 O8 M9 l. S# | }7 g. _1 r
2 o! d; Y i* _: z$ T* r* `, R
1.1 深海运载器探测技术
: b& \4 z+ H5 f0 r 深海运载器是携带各种电子设备、机械装置或 专业人员,快速和准确地到达各种深海环境,进行精确探测和科学研究的装备平台。深海运载器分为载人潜水器(HOV)和无人潜水器(UUV)2个大类,其中无人潜 水器又可细分为无缆自治潜水器(AUV)和缆控潜水器(ROV),近年来迅速发展的水下滑翔机(Glider)通常被划分到无缆自治潜水器序列中[1-4]。作为综合性的水下机动平台,深海运 载器自身配置探测设备开展精确探测,还可具有针对性地配置其他高精尖探测设备开展原位探测,是 目前深海探测技术领域的“集大成者”,具有全面的技术特点,是深海探测技术的发展热点。1890年,全球首艘水下运载器(Argonautthe First)诞生。20世纪60年代,法国成功研发首台配 置推进器的水下运载器。同期,全球首艘载人潜水器“曲斯特I”号由美国研发并海试成功,最大下潜 深度为10916m,创造全球最大下潜深度记录[1-3]。在此基础上,以美国“阿尔文”号为代表的现代 载人潜水器逐渐发展,并帮助人类开展一系列深海探险活动。“阿尔文”号具有人眼观测、高清摄像和声学扫描等先进探测手段,具备化学传感、生物调 查和地质取样等能力,为美国在全球载人潜水器领域占据领先地位奠定基础。“阿尔文”号执行了众多重要任务,比较典型的是1966年成功执行军方失事坠海氢弹的紧急探测和打捞任务,轰动军事界;1977年首次搭载人员在加拉帕戈斯断层带发现和证实海底热液区,并开展海底地质环境和生物群落等相关科学考察,获取宝贵的第一手数据;1979年在东太平洋的中洋脊首次发现高温黑烟囱。迄今 为止,“阿尔文”号已完成超过5000次下潜任务,是全球范围内应用最多的载人潜水器。在“阿尔文”号的影响下,许多国家陆续开始研发载人潜水器。日本“Shinkai6500”号最大下潜深度为6527m,配置三维成像声呐、可旋转式采样篮、高清摄像机、CTD传感系统和导航定位系统等 先进探测设备,对锰结核、热液沉积物、钴结壳和 6500m以深的大断层开展科学调查,并首次探测到并获取古老的鲸鱼骨骼及其寄生贻贝的数据,目前已下潜超过千次[4]。俄罗斯于1987年研发6000米级“和平”系列载人潜水器(MIR1 和 MIR2),可持续开展长达20h的下潜和探测工作,工作能量是美国“海涯”号和法国“鹦鹉螺”号的2倍,并具有高机动性,水下瞬时速度可达5kn[5]。“和平”系列载人潜水器在印度洋、太平洋、大西洋和北冰洋完成数千次科学考察任务,尤其是完成“共青团”号核弹潜艇的核辐射探测、“泰坦尼克”号沉船的搜索和视频拍摄以及“北极-2007”海洋调查等任务[6],充分展示其卓越的技术能力。以法国、德国和英国为代表的欧洲国家在载人潜水器研发方面也具有较强的基础和实力,其中较 著名的是法国研发的“鹦鹉螺”号6000米级载人潜水器,具有本体重量轻和能够水下强机动等优异的技术特点,此外配置1台小型水下运载器,可实现多维度深海探测,目前完成深海资源勘探、环境调查和军事搜救等任务超过千次。在国家“863”专项的支持下,中国船舶重工集 团公司第七○二研究所、中国大洋矿产资源研究开发协会、中国科学院沈阳自动化研究所和中国科学院声学研究所等单位联合研发我国首台7000米级“蛟龙”号载人潜水器。“蛟龙”号于2012年成功下潜至7062m,是全球下潜最深的科学作业型载人潜水器;配置高分辨率侧扫声呐、水声通信和信号处理系统以及原位地质力学测量、热液保真取样、温度测量、微生物取样、多参数化学传感器和小型钻机等先进设备,深海探测能力强大[7-8]。此后,我国完成4500米级载人潜水器的研发和海试,充分吸取“蛟龙”号前期设计和应用中的经验和教训,同时大幅度增加本土化设计,实现自主创新。 . z, X- M6 i& l' p" B! f) _) e# o* B
1.2 深海传感探测技术
. ^# e0 |, w( c 1.2.1 深海声学传感探测技术
" y" L/ z- l! d$ ? 深海声学传感探测技术利用声波传递过程中入射声波与反射声波在频率、时间或强度上的差异开展深海探测,可分为超短基线定位技术、声学多普勒测量技术和沉积物声波采集技术等,被广泛应用于深海数据获取、导航定位和目标探测等[9],具有代表性的有侧扫声呐探测技术、多波束探测技术、合成孔径声呐成像技术和浅地层剖面测量技术。
: e& O" l) T! \# h2 X- U' l$ F (1)侧扫声呐探测技术通过实时图像探测海底地貌,可实现超视距观察、目标搜索和障碍物躲避。该项技术诞生于“二战”期间,主要被应用于军事领 域;20世纪60年代英国研发全球首台民用侧扫声呐系统,被广泛应用于科学研究;美国、法国和挪威等国家陆续研发EdgeTech系列和 Klein系列等多型产品,处于全球垄断地位。我国于20世纪70年 代开展侧扫声呐的系统研究,中国科学院声学研究所、哈尔滨工程大学、西北工业大学和华南理工大学等单位研发 SGP型和 CS-1型等设备,但技术水 平总体较落后,且尚未实现产品化。 $ ]7 G$ C! O* J y3 T! C+ V" W9 ?! q$ @
(2)多波束探测技术利用海底反向散射的声学机理,实现大深度海底底质形貌的信息获取和图像构建,基于多普勒效应的流速测量传感器可用于测量深海海流剖面。目前全球对深海流场了解甚少, 深海流场测量具有重要的科学价值。挪威、美国、德国和丹麦等国家在多波束探测技术研究和应用领域全球领先,并完成产业布局,以丰富的产品类型和先进的技术指标,处于全球垄断地位。我国多波束探测技术研究仍较落后,仅有哈尔滨工程大学、中国科学院声学研究所、中国船舶重工集团公 司第七一五研究所和浙江大学等单位开展相关系统研究,目前已完成多型浅水型多波束测深声呐的研发,但尚未实现产品化。 : a/ t! e: H) C7 {! _. i* s
(3)合成孔径声呐成像技术利用声呐阵列向下方发射扇形波束,以小孔径声基阵的匀速直线运动虚拟大孔径声基阵,对深海环境进行超视距观察, 可搜索目标和躲避障碍物。该项技术起源于陆地雷达成像技术,是声呐成像技术热点之一。目前欧美国家在相关研究和应用方面全球领先,如法国、挪威和美国等国家陆续研发SHADOWS、HISAS和4400SAS等产品。我国于20世纪90年代开始由中国科学院声学研究所和中国船舶重工集团公司第七一五研究所开展大量研究,于2005年成功海试首台具有自主知识产权的合成孔径声呐,目前苏州桑泰海洋公司的相关技术和产品已达到国际先进水平。
" A8 Z1 _7 Q* p* L (4)浅地层剖面测量技术利用2组指向成交的声学换能器阵列,在航向线上构建测深剖面带,通过条带上每个点的高分辨率深度值测量地形。浅地层剖面仪于20世纪40年代开始研发,并于60—70年代实现产业化;21世纪以来,随着电子控制、传感检测、信号处理和云计算等技术的飞速发展,挪威和美国处于全球领先地位,具备绝对实力。我国于20世纪70年代开展浅地层剖面仪的研究工作,并取得一定的成果,但与国外同类型产品相比, 技术可靠性和成熟度仍较低。
: ]7 j" ]5 s5 k! h: u j' [: y3 E 1.2.2 深海光学传感探测技术 7 v4 T$ t. V- B o0 P. R+ E+ d
深海光学传感探测技术主要根据光在水体中传输的特性和规律以及水体物质相互作用的机理, 实现深海目标识别和水下通信[10],具有代表性的有水下光学传感技术、光纤水听技术、水下激光通信技术和水下光学成像技术。
! A6 M; |5 w |% D' ?" o5 b (1)水下光学传感技术基于光源发出的光与水体物质的吸收散射等相互作用,通过检测特征光谱波长的大小和强弱,反演物质种类和含量。美国MBARI海洋研究所是将拉曼光谱技术应用于深海探测的先驱,已在天然气水合物探测、热液探测和碳循环研究等方面取得显著成果,此后德国和法国都开展相关研究。“十一五”期间,在国家“863”专项的支持 下,中国海洋大学研发拉曼光谱探测系统,中国船舶重工集团公司第七一七研究所、武汉理工大学和武汉大学等单位也在光电探测领域开展部分研究。 0 |, p) {3 S5 {
(2)光纤水听技术将水声振动转换为光学信号,并通过光纤传输至信号处理系统,实现信号提取。该项技术是全球热点技术,美国、英国和法国等国家已开展大量研究。美国于20世纪70年代最早开展相关技术研发,1983年首次完成海试,1988年完成光纤水听系统(AnOpticTowedArray)的探测试验,目前大多数新型军用潜艇均采用光纤水听器阵列技术;1998年英国开展水听声呐研究,2000年与美国联合研发成像系统,实现8km和96个探头的水下传感探测。我国光纤水听技术研究起步较晚,主要由哈尔滨工业大学、南开大学、中国船舶重工集团公司第七一五研究所和武汉理工大学等单位开展实际研究,已研发4元光纤水听传感阵列和PGC光纤水听声呐传感系统等,但技术水平总体较 落后。
8 A1 ^/ W9 Z# d# H8 o) A8 h$ I (3)水下激光通信技术以激光为载体,通过不断的脉冲信号和数字编码进行载波调制和解码,实现水下数据无线传输。美国、澳大利亚和日本等国家很早即开展相关研究,近年来发展迅猛,相继突破水下激光高速率数据传输技术,为相关应用奠定基础。2015年日本山梨大学采用波长为405nm的LD光源,在4.8m的清水中成功实现1.45GB/s的数据传输;2016年美国克莱姆森大学采用波长为445nm的LD光源和OOK-OAM调制模式,在2.96m的水下成功实现3GB/s的高速率数据传输。我国水下激光通信技术研究刚刚起步,主要由清华大学、中国科学院自动化研究所、哈尔滨工业大学、中国科学院上海光学精密机械研究所和浙江大学等单位开展研究。2016年浙江大学采用波长为685nm的红色激光和32-QAM OFDM调制模式开展水下激光通信实验,数据传输速率达到4.883GB/s。 / p) v6 A: G) G4 H O: z1 I- E
(4)水下光学成像技术利用水下照明和摄像设备获取目标的图像信息,可应用于深海勘探和环境监测等领域。该项技术于1856年起源于英国,目前挪威和美国在相关研究和应用方面全球领先,如OE14-408E系列和MultiSeaCam1060等产品均具备优异的技术性能。我国主要由哈尔滨工程大学、浙江大学和中国科学院西安光学精密机械研究所等单位 开展研究,但仍处于技术研发和试验阶段,尚未有成熟化的产品,相关设备主要依靠采购。 % V; U- C+ j1 U1 e' H6 M
1.2.3 深海电磁学传感探测技术
" @) C) v% i1 f- H 深海电磁学传感探测技术通过电磁学方法获取深海场源的电磁场值,并通过对断面的反演实现地下电性分布探测。美国和英国对深海电磁学传感探测技术的研究全球领先,并已实现产业化,为相关企业提供实质性的服务[11]。我国相关研究较落后,开展研究的单位也较少,中国地质大学研发海洋大地电磁采集站,但尚未实现产品化。 1 C6 g$ g% }4 y6 q* F- Q: T& W% E
1.2.4 深海热学传感探测技术 ' d& J$ ~7 H6 [1 H& G- }9 A
深海热学传感探测技术利用热敏元件感知和测量深海沉积物参数,可为海区地球动力、海底热液活动和大陆边缘沉积盆地的演化以及油气水化 合物资源的评价等研究提供重要的基础数据。美国 WHIO 海洋研究所、MBARI研究所、华盛顿大学和明尼苏达大学等对深海热学传感探测技术开展大量研究,利用热电偶传感器(Hobo和Vemco)在东太平洋热液区获取400℃热液喷口的原位测量数据,并利用铁合金封装的J型热电偶传感器测量深海热液喷口温度。我国浙江大学、中国科学院海洋研究所和原国家海洋局第二海洋研究所等单位开展相关研究。浙江大学探索深海热液区原位温度的长时序探测,并取得一系列研究成果;2014年“蛟龙”号分别搭载由国家深海基地管理中心和浙江大学研发的温度梯度仪成功完成海试,并获取海底温度的原位测量数据。 3 `3 t, ^6 W4 {1 J. O
1.3 深海取样探测技术
" m+ K1 g' t8 U 1.3.1 深海生物取样技术 ' W2 u) k0 \$ Z: l
深海生物取样技术在早期科学调查中被普遍应用,实现对海洋浮游生物和海洋底栖生物样品的采集,采集工具主要有拖网、采水器和采泥器等[11]。其中,由6位通道转阀控制的自动微生物取样器(AMS)可很好地采集热液体中的无污染微生物样品;由球阀控制的多瓶取样器(WHATSII)可实现4个取样瓶同步的样品采集;微生物长时序自动取样器(OsmoSampler)可实现长达3年的连续样品采集,但采集速率易受海底温度等因素的影响。
2 `4 y8 s) G5 W 1.3.2 深海海水取样技术
7 a% p: _3 y3 k. E9 n) M 深海海水取样技术利用采水器设备以及电力和机械等控制方式,在 一定深度实现海水样品采集。美国和日本等国家开展相关研究并取得代表性成果:哥伦比亚大学研发深海气密采水器(Aqua LAB),可分析示踪气体、序列采集海水样品和高保真短期采集海水样品,单个海水样品的最大容量为1L,最多可采集50个,采集深度达6000m;华盛顿大学研发通过机械手触发的采水器(Lupton),并在海底热液区完成数次科学调查;东京大学研发利用 泵和多通道转阀实现旋转式海水样品采集的设备, 每次可采集5个海水样品序列;北海道大学研发搭载在深海运载器上的气密采水器(WHATII),用于采集海底热液口的海水样品,最大工作水深为4000m。为提供高质量的气密海水样品,美国罗得岛大学和 WHIO 海洋研究所共同研发搭载在无缆自治潜水器上的气密采水器,单个海水样品的容量只有20ml,每次下潜可采集8个气密不保压的海水样品。美国 MBARI研究所研发搭载在无缆自治潜水器上的主动式大容量采水器(GulperSampler),可在2s内快速采集海水样品,单个海水样品的最大 容量为2L,最多可采集10个。此外,美国 WHIO 海洋研究所吸收前期采水器的优点,研发搭载在载人潜水器上的保压采水器。采用2个独立腔室的结构,其中1个腔室预先填充氮气作为储能室,确保海水样品始终保持压力平衡状态,同时采用电机触发的设计方案,使海水样品采集过程更加自动化。
9 [0 b5 I# X6 x! }/ Q7 S$ d- _ 1.3.3 深海岩芯取样技术 # l2 i: o7 k! x0 m" P- c
深海岩芯取样技术通过冲击、射入和钻机等方式采集岩芯样品,目前已被广泛应用。 ' P: B- B! S9 s9 q# J
(1)保压取芯器(PCS)。保压取芯器以液压驱动单元为动力,利用其自重和自由落体运动采集岩芯样品,并利用钢缆回收,由取样管、球阀组件、动作筒组件、锁机构、蓄能器和管路组件6个部分组成。保压取芯器长为1.5m、直径为99mm、最大承压能力为69MPa,采集岩芯样品 的最大直径为43mm、最大长度为990mm,存在采集岩芯样品直径较小以及无法在不降压的条件下将岩芯样品取出的问题。
3 ?3 H- v# f& b- y) S (2)保压取芯筒(PCB)。与其他岩芯样品采集设备相比,保压取芯筒的保压性能较好,但结构较复杂。美国的DSDP-PCB、ESSO-PCB和Christensen- PCB的设计结构基本相同,均采用双管单动式。与保压取芯器相比,保压取芯筒的长度较长(4.5~ 10.0m),通常须配置较大的卸压采气设备,且须切割岩芯样品以封装保存。
o0 l5 t, ?0 T2 b8 T% ^) x (3)HYCINTH系统。HYCINTH系统是为天然气水合物沉积物和深海生物而特殊设计的岩芯样品采集系统,根据不同的海底地质条件,目前已研发冲击式取样器(FPC)和旋转式取样器(HRC)。其中,冲击式取样器的最大采集深度为1m,采集岩芯样品直径为57mm,保压能力为25 MPa;旋转式取样器的最大采集深度为lm,采集岩芯样品直径为51mm,保压能力为25MPa;二者采集岩芯样品后的操作相同,即通过翻板阀实现高压腔室密封。
- o/ u7 z3 P! W/ ] (4)运载器取芯器。随着深海运载器的广泛应用,依托其精确作业的特点,多类型基于深海运载器的岩芯样品采集设备快速发展。1991年 “阿尔文”号搭载取芯器(HSTR)采集直径为480mm的岩芯样品,受到广 泛关注;1995年美国Harbor Branch海洋研究所研发7000米级运载器取芯器,并搭载在缆控潜水器(Magellan)上成功海试;俄罗斯基于深海运载器的取芯器具有大功率和大强度等优点,可在花岗岩和玄武岩等硬岩上采集岩芯样品;英国、法国和日本等国家的载人潜水器均配置岩芯样品采集设备,并完成多次采集作业。 0 h {, q; F) n4 O. [" J
二、关键性深海探测技术
8 F5 {2 i1 Q6 S* c 由于深海具有可视性差、水压力大和地形复杂 等特征,人类对深海的认知极其有限,深海探测技 术的研究和应用也极具挑战性。为实现精确、可靠 和 高 效 的 深 海 探 测,亟 须 开 展 关 键 性 技 术 攻关[12-13]。 & y* ^( ^; G) Y* l0 K" i1 f1 N
2.1 深海光学通信技术 0 R) I- u% c) \7 \ O j4 o
目前深海探测主要以水声载波的方式进行信息交互,受海水介质的制约,声学通信数据传输的极限速率仅为1500m/s,同时存在数据损耗大、环境噪声大以及受水体折射和漫反射多径效应影响等问题,导致通信质量较差和稳定性较低。以人工智能和大数据处理为代表的新一代深海探测技术亟须突破通信“瓶颈”。光学通信具有传输速率高(GB/s级别)、无线、方向性好和隐蔽性强等优势,可弥补声学通信的诸多不足,是深海探测技术发展的“命脉”。未来深海探测的水上部分可采用电磁通信技术,水下部分可采用光学通信技术,实现各平台和传感器之间以及海-空-天之间高速和稳定的数据传输。
$ |5 z* ~& o8 G% D5 X. q 2.2 深海导航定位技术 4 x& ~4 {3 q4 i$ n! Y
导航定位技术在深海探测技术体系中占有重要地位,直接反映水下作业的精确性和安全性,主要分为惯性导航、声学导航和海洋地球物理 导航3种技术类型。
" N9 C. C4 i* t4 ]; N4 }7 E9 J (1)惯性导航是最基本的导航定位系统。受海水介质的制约,水下电磁波衰减严重,惯性导航系统仅能在入水前根据初始点推算导航定位,而无法实时反馈和修正位置信息,随着作业距离和时间的累计不可避免地存在偏差,须回到水上调整,极大地影响深海探测效率,且无法实现精确作业。
2 W( D& T+ O. h7 u (2)声学导航利用信标发射和接收声学信号,通过一定的算法推算 导航定位,通常分为长基线(LBL)、短基线 (SBL)和超短基线 (USBL)3 个 类型。受海水介质的制约,声学导航系统存在严重延迟、易受干扰和易暴露等问题。 $ j" E/ d* e, @8 \
(3)海洋地球物理导航的误差与作业距离和时间无关,具有精度高、受限少和隐蔽性强等优势,是目前全球研究热点。随着光学传感技术的进步,深海光学导航定位技术越来越引起全球各国的重视,SLAM导航系统迅速兴起,通过识别和提取采集到的声呐图像和数字图像的特征点,实现深海探测定位和环境地图合成,有望产生革命性成果。 , N7 B1 Q- }- o" X8 G8 C
2.3 深海动力能源技术
! {" f! X4 [6 E4 R4 ^& }9 K 由于存在燃料补充、废气排放和压力承受等困难,深海探测对动力能源提出更高的要求。深海动力能源技术既要突破耐高压、耐低温和耐腐蚀等难点,又要实现高稳定性、高安全性、高可控性、高容量和低成本等目标,是未来深海探测的关键性技术。目前深海探测的动力能源主要包括铅酸电池、银锌电池、镍基电池、锂电池、燃料电池、核能、海洋温差能和柴油等。其中,银锌电池是普遍采用的动 力能源,具有比功率、比能量、安全性和稳定性均较 高的优点,但也存在充电次数有限、寿命短和成本极高等缺点;锂电池是目前综合性能最好的动力能 源,具有电压高、能力强、寿命长和充电快等优点,我国4500米级载人潜水器已采用锂电池供电的技术方案。大型军事潜艇通常采用小型核能装置或封闭循环柴油机提供动力能源。核能具有无限续航、安全性高和连续工作时间长等优点,可有效解决深海探测动力能源持续供给的问题,发展前景广阔。
; Z# S' q# |" {% x( ? 2.4 深海装备材料技术
5 Z. B3 K* k. O 综合考虑使用成本和加工难度,目前全球普遍选择不锈钢或镀层铝合金作为深海探测装备的主材,耐压壳通常采用不锈钢。这些材料造价适中,但密度较大,极大地增加装备的整体重量,使搭载设备受限。钛合金具有密度低、强度高和耐腐蚀等 优点,但价格昂贵且加工困难,难以广泛应用于深海探测装备。以碳纤维和多孔结构为特征的复合浮力材料 是深海探测装备的理想材料。日本将2种不同大小的中空玻璃微球添加到环氧树脂中,融合得到高强度和低比重的复合泡沫塑料,并应用于 “Shinkai6500”号载人潜水器。以陶瓷为基础的复合材料具有超强的耐压力 和天然的耐腐蚀力,且在同等耐压条件下密度较低和体积较小,可降低材料成本和防止结构老化。美国“海神”号深海运载器即采用大量陶瓷复合材料,其耐压壳采用氧化铝陶瓷作为基材,与采用纯钛合金相比轻331kg;“海神”号于2009年成功下潜至马里亚纳海沟10902m深度,充分验证其强大的耐压 性能。
6 {0 a+ b5 M- a# V- } 三、深海探测技术的发展趋势 ! G2 `7 x7 H( _6 U4 a1 M3 ^ U# r
3.1 体系化
: ^$ b o, G- e4 p5 g* Y 深海探测技术的进步使大范围、高精度和准同步的全球深海探测成为可能。深海探测技术的体系化有助于获取多学科、多尺度、立体化和长时序的深海探测数据。基于海量数据,采用新理论、新模型和新方法,促进深海动力环境、深海地球物理场和深海工程地质等领域的科学研究。
2 X+ H- B+ @! n9 s' o. g 3.2 协同化
& M/ Y4 w' G" h# Y3 S 深海探测的手段有限且成本极高,协同化作业是新一代深海探测技术的发展方向。结合人工智能、环境感知和通信控制等新兴技术,在特定海区大量布设以无缆自治潜水器为代表的深海运载器,有望实现大规模和多平台的组网作业,提高协同探测能力。 5 F! V3 [$ l3 a% w* a
3.3 智能化
& v- R9 |8 L; o$ e* O$ b+ B 2010年以来,以虚拟代理、决策管理、深度学习和生物特征识别等为代表的人工智能技术备受关注并蓬勃发展,已融入和改变人类的生活和生产。在深海探测领域,可利用人工智能技术开展探测目标的识别和提取、探测装备的故障诊断和容错控制以及深海环境的高效感知等,推动深海探测技术的全面智能化。
! H1 J' b0 D7 k2 ]9 S! ?) ~ (点击文末“阅读原文”查看参考文献) - _+ Z; Y6 H9 z) W' c
来源:本文刊发于《海洋开发与管理》2019年第4期,海洋知圈微信平台编排(版权归原作者及刊载媒体所有)
1 ~2 o n: W' _& E* M, M t 欢迎大家关注《慧天地》同名新浪微博
( D2 l+ _0 s# z3 ]; F 微博ID:慧天地_geomaticser 3 I2 c4 V/ k. z3 Q
 fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
0 o' T ]8 h; h! z }4 v4 j5 _
2 d7 z% H2 g. {5 e
! U c" i: @" T0 }, \
荐读 ) B' I* X1 ~, ~! P8 j
点击下文标题即可阅读 . u; y; a' ^% V1 T s6 `
吴立新院士谈经略海洋 ! _3 M/ ?' R5 X. f: j- F7 h
走近2018年国家科技进步二等奖项目——海洋测绘和内陆水域监测的卫星大地测量关键技术及应用 ! z) g& o. X8 u
潘德炉院士:海洋遥感事业就是我的孩子
% t4 A" {. A2 T4 v2 L. Y" w+ Q
7 w& x9 i* ?9 K3 J
编辑 / 张胜威 审核 / 富裕 张胜威 4 m5 Z3 a% o4 `0 L* n
指导:万剑华教授 ( b2 _7 u4 w" v" W
( Q. p6 L3 e* ?9 v+ g0 K
0 ?5 P c/ @) V9 P/ I w) G. b9 R) G+ g U- I
9 g4 I8 Z/ {! \7 n; P. |9 \
|


