从明朝郑和七下西洋,到意大利哥伦布发现美洲新大陆,再到英国“挑战者”号完成世界首次环球海洋科学考察……几百年来,人类以海为媒,进行沟通和贸易,也逐渐关注海洋本身,研究这个占地球面积最大(71%)、却为人所知甚少的蓝色世界。作为探索海洋、认识海洋和开发海洋的重要装备,潜水器(有时也称为“水下机器人”)日益成为科考船的标配,如今正迎来百花齐放的发展时期。* d$ l/ u5 l; c/ N- A
% D0 A- Q8 T: r9 V: z7 `
& F- ]& d- e1 E4 k6 X0 _/ G
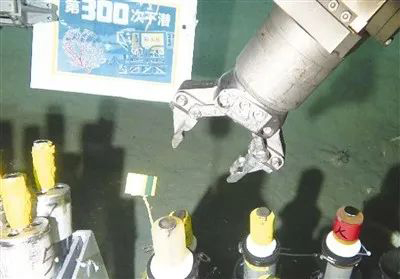
日前,中国科学院海洋研究所无人有缆潜水器(ROV)“发现”号完成下潜300次;自然资源部中国地质调查局青岛海洋地质研究所自主遥控潜水器(ARV)“问海1号”入列“海洋地质九号”科考船……作为海洋科考重镇,青岛的潜水器特别是无人潜水器的发展日新月异,彰显着我国在该领域进入快速发展期。6 a: S# e _) |6 P/ A9 Y; t/ b
, Y2 ]+ P# D8 v& l) c- k
9 M7 h1 d# o2 S* s- R“发现”号下潜300次的背后
% x+ q9 k, _# C/ K) e7 d/ R0 R/ m1 ^3 y. x! b' S7 y3 W8 h
张鑫到中科院海洋所参加工作的2009年,所里了解、使用潜水器的科学家屈指可数,而他在国外主要从事深海拉曼光谱原位探测技术(拉曼探针)研发,科研工作又需要潜水器支持。
5 J7 I/ V3 n @# @& R
5 K' K" v s2 R& |/ i0 v( l" Q
) c* O$ r7 a2 r" ]4 o, G“拉曼探针在海底工作离不开潜水器平台支撑。在海中,它将一束激光打到深海环境中,根据激发光的后向散射信号就可以获得被测物质的化学成分、生理状态,因此不会破坏海洋生物及其生存环境。” 从工作伊始至今,张鑫一直在研发拉曼探针并以此开展原位实验。他回忆说,在参加工作后的很长一段时间里,因为国内不具备科研条件,他每年都要花费两三个月出国做实验,“当时,我越发觉得要在国内继续我的事业,第一要务是能有一条先进的科考船提供科考平台,其次科考船上要配备一个先进的水下机器人,带着拉曼探针进行深海探测和实验。” ' P* V9 F/ Y b9 c3 m% K
, u9 I A D9 d$ Q* h这个机会不久就来了。2010年, 我国综合性能最先进的科考船“科学”号开工建造,2012年交付中科院海洋所管理运行。“幸运的是,由于当年造船使用的钢材价格一路走低,建造科考船的费用节省出了5000多万元。” 张鑫说,当时由他担任工程技术部副主任,全权负责设计定制一个4500米级的水下机器人。该工作从2012年开始,一直持续到2014年,他带领团队提出设计需求并进行监造。这个水下机器人就是如今的“发现”号ROV,在今年7月10日,“发现”号完成了第300个海洋科学考察潜次任务。
% m# b e7 L1 n/ b. l- t( m) l3 y' s- M9 ]
. X" i, |' U- O( X: i% }0 e1 E一般而言,无人潜水器分为无人无缆潜水器(AUV)和无人有缆潜水器(ROV)。AUV自带能源,可自主航行,能够执行大范围探测任务,但作业时长、数据实时性等能力有限。ROV有一条电缆与母船连接,依靠脐带电缆提供动力,水下作业时间长,能够实现海底精确图像数据的实时传输,作业能力较强,但作业范围有限。近年来,我国结合AUV和ROV的优点,还研发了自主遥控水下机器人(ARV),既可以无缆自主作业,也可以有缆遥控作业。相较而言,这些潜水器各有优势特点,但在海底作业的优势是共同的:一是可在海底进行原位观测,并拍摄高清海底光学影像,同时可以开展深海激光扫描作业,其空间分辨率可达到厘米级;二是可以直接在海底开展实验,最大程度认知深海生命过程变化,这是陆地实验室无法比拟的。
' l4 M& \( I$ C2 N- w- Y6 J4 m L7 v0 {6 C' X' _
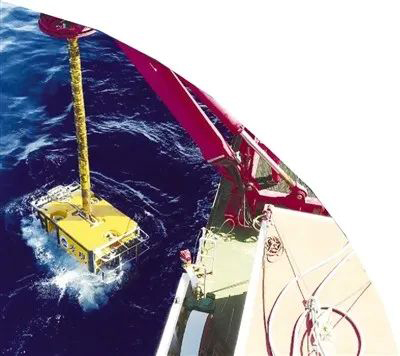
▲这是“发现”号 ROV ,从科考船甲板上可以看到需要加装的浮球。
+ K# R* d9 n; F3 c& x: A4 s2 @) [. @9 x+ s6 n$ F" T
“以往的深海研究是将深海样品取样,带回陆地实验室进行分析。但由于取样扰动带来的样品变化,特别是深海样品从海到陆后由于压力、温度等因素的骤变,其生理活动可能也发生了改变,导致后期的分析研究并不准确。” 借助“科学”号科考船和“发现”号潜水器,张鑫在国外的科研工作很快在国内“复现”。2015年,他首次将自主研发的国际首台耐高温(450℃)拉曼光谱探针安装在“发现”号上进行应用。他说,利用潜水器上安装的拉曼光谱探针等设备,可以直接对深海极端环境进行化学成分分析;也可以利用潜水器在海底做实验,实现将实验室搬到海底。这种无须传统取样方式的原位探测技术和实验,已成为国际深海研究的热点。
4 i1 T( P! Z/ P# }
7 I' ]' Z6 j" b# i9 `7 O6 i) I9 L: t- `! z
正是潜水器独具特色的装备优势,使得西方国家利用潜水器快速进入深海热液、冷泉等极端环境,科研成果频出,我国在无人潜水器领域的研发也在这个时期开始兴起。除“发现”号ROV外,2009年,我国首台具有3500米作业深度的无人有缆潜水器“海龙II号”ROV由上海交通大学完成研制,开始试用。时间再稍往前,中科院沈阳自动化研究所研发的CR-02,是继CR-01之后我国第二台6000米级AUV,于2007年通过技术验收;中科院沈阳自动化研究所研发的北极ARV,最大潜深100米,已于2008年搭乘“雪龙”号科考船出征我国第三次北极科考。这几个不同类型的无人潜水器,加之载人潜水器“蛟龙”号,基本就是21世纪第一个十年里我国潜水器的家底。' p9 B3 _* \ U" I
' K6 C* ^1 u' C+ X( `" \" R
8 g# K+ f, s3 g$ \7 S) {! O而“发现”号ROV的研发,也为我国后来的无人潜水器发展提供了技术借鉴。“以往的潜水器上面通常安装巨大的脐带电缆管理系统(TMS),科考船通过铠装光电复合缆连接这个系统,这个系统中储存的零浮力脐带电缆再连接潜水器。这主要是借鉴了用于海洋工程的无人潜水器的做法,但海洋科考与之不同,在实际应用中难以保持潜水器与TMS相对稳定。”张鑫说,“发现”号ROV最大的不同就是不再保留这套TMS系统,而是直接在靠近潜水器端的最后50米铠装电缆上加装浮球,使其在海底保持正浮力,这样在科考作业时电缆在水中形成了一个接近百米的“S”形,潜水器可以自由移动,且不易与铠装电缆产生纠缠。自“发现”号ROV如此设计之后,我国后来研发的科考型ROV也都沿用了这种方法。+ a" p: T+ [& }* b. ?0 b
9 p' `7 k$ ]- a7 B& s# T5 Z
' ?6 a( m5 x. |: K' c2 F青岛的无人潜水器已有近20个
6 d6 E' f7 B# {3 w- ~4 N
8 b- P, m [: ^走进国家深海基地“走向深海”展厅,可以看到陈列其中的我国各类无人潜水器模型。最令人瞩目的自然是“蛟龙”“海龙”和“潜龙”三大深潜装备系列,它们大小、形态各异,是载人潜水器(HOV)、无人有缆潜水器(ROV)和无人无缆潜水器(AUV)中的代表。4 C2 X5 R7 m. h6 r: K
2 w6 U* K+ W5 q9 n' C* T8 s! E% u$ U! H% t( B9 I
“深海蕴藏着丰富的资源,是地球上远未充分认识和开发的宝藏。” 国家深海基地管理中心副总工程师丁忠军说,随着国际海底调查研究工作的深入,我国自2001年起相继获得包括多金属结核、多金属硫化物、富钴结壳等资源类型在内的5个大洋海底勘探合同区,成为海底矿产资源种类最全、勘探合同区最多的国家之一。深海矿产资源勘探、开发,离不开深海探测装备支持,利用载人潜水器抵达海底,可以对海底资源环境进行更加详细的实地勘查,因此,“蛟龙”号研发快速提上日程。/ F) J: S, e. `
' ?6 _8 a* V( \& R3 A1 n# I4 J$ M6 a5 a8 h2 x
“蛟龙”号如此,“海龙”号、“潜龙”号亦是如此。以“潜龙”号为例,为了满足我国已申请的国际海底矿区勘查和新矿区圈定的迫切需要,中科院沈阳自动化研究所联合国内多家机构于2012年12月成功研制“潜龙一号”,这是我国具有自主知识产权的首台实用型6000米AUV,具有微地形地貌测量、海底照相、磁力探测等功能,可在水下6000米处自主巡航,连续工作24小时。此后,中科院沈阳自动化研究所相继研发出“潜龙二号”“潜龙三号”和“潜龙四号”,性能参数皆有变化。值得一提的是,“潜龙一号”和“潜龙四号”为6000米级,外形为圆柱形,作业区域更适用于海底相对平坦的矿区;而“潜龙二号”和“潜龙三号”为4500米级,外形为立扁鱼形,因此更有利于在复杂海底地形矿区作业。“潜龙”系列潜水器的研制,为我国深海资源精细勘查提供了有力手段,填补了我国深海资源自主勘查的空白。
- J1 G: \* ]/ c) a! \+ [; }/ h) a, m- N4 I
7 `+ r" g& P4 y6 S# [$ `“进入21世纪第二个十年,即从‘十二五’开始,我国在研发载人潜水器的同时,无人潜水器也快速发展,可谓日新月异。”丁忠军说,“潜龙三号”由中科院沈阳自动化所移交深海中心,“海龙Ⅲ号”ROV移交工作正稳步推进。目前,深海中心管理运行的“蛟龙”“海龙”和“潜龙”三大深潜装备已有10余个。此外,还有深海钻探的“深龙”号、深海开发的“鲲龙”号、海洋数据云计算的“云龙”号以及作为立体深海科考支撑平台的“龙宫”等,深海潜水器重大装备体系不断完善。) b# N; R0 m- u2 M5 C& q J
6 _8 g. t1 Z/ K2 w
, n" p# X9 z5 R6 {: x除了AUV、ROV之外,我国ARV也不断发展,自然资源部中国地质调查局青岛海洋地质研究所6000米级“问海1号”ARV就是典型代表。据了解,“问海1号”是我国首台交付工程应用的自主遥控无人潜水器,具备自主、遥控、混合三种工作模式,可搭载高分辨率测深侧扫、浅剖、重力仪、磁力仪、高清摄像机及机械手等进行大范围近海底自主航行探测和坐底定点精细取样作业。在今年的海试测试中,“问海1号”整体性能得到验证,在无缆模式下最大航程可达45公里,在光纤微缆模式下最大航程可达21公里。目前,“问海1号”已列装“海洋地质九号”船,将服务于海洋环境调查、生物多样性调查、海底特定目标物探查、深海极端环境原位探测和深海矿产资源调查等深海科考工作。
% p, R% m; Q4 U! m& s# z
1 H* m, H$ g% D. C- u+ g
; k3 S3 S$ {# P9 Y$ d此外,水下滑翔机作为一种靠浮力驱动的新型无人无缆水下自主航行器,因具有长时间、大范围海洋环境观测能力,也发展迅速。在青岛,最具代表性的是青岛海洋科研院所联合天津大学研发的“海燕”水下滑翔机。据介绍,2015年之前,国际上仅有一型工作深度超过4000米的水下滑翔机产品。而“海燕-X”水下滑翔机在2020年最大下潜深度达到10619米,这是国际上滑翔机首次进入万米深渊,标志我国在万米级水下滑翔机关键技术方面取得重大突破。( ~2 q2 E* |2 J) _) p0 g
1 s+ {! m8 {. V0 U* i
/ I8 T9 {4 ~ Z% m总体来看,目前我国不同类型的无人潜水器已形成系列化、谱系化,数量倍增。以“潜龙”“探索”“悟空”系列为代表的AUV,以“海星”“海龙”“海马”系列为代表的ROV,以“海斗”“思源”系列为代表的ARV,以“海翼”“海燕”系列为代表的水下滑翔机,代表10多年来我国无人潜水器日益强大的家底。据统计,青岛管理运行的无人潜水器已有近20个。3 p* } i6 c- o
( V% |- N4 i# B; L! ~
" T. @! ^5 ~6 {! f- w) ?$ R; M9 x
“我国无人潜水器发展成绩显著,但也面临着一些挑战。”丁忠军表示,我国潜水器一般都是单台套作业,虽然潜水器组网观测也在发展中,但与国外相比,还存在一定差距,需要进一步布局。此外,我国无人潜水器产业也需进一步完善,应在材料、能源、传感器等领域形成体系,推动人工智能、仿生学等新技术与潜水器研发融合。相信在不久的未来,国产化、智能化、业务化水平更高的无人潜水器会不断产出,推进我国“深海进入”“深海探测”“深海开发”,加快向海洋强国迈进。
) n/ E- y7 n5 m! W, K D. n$ a! h; A$ Y; y S* `; ^
该文章来源互联网,如有侵权请联系删除" `) g# O1 \$ F+ v3 ^5 b
查看原文:www.52ocean.cn |