引子
前面的文章分别讲了海底探测类载荷和机动平台,这周从实际任务出发来把二者结合起来聊聊系统和系统级技术方案。
随着第三次工业革命信息技术产业的大发展以及第四次工业革命智能化产业发展的来临,无人装备制造领域取得了巨大进步,其中无人机和无人汽车已经逐渐走进人们的生活,在海洋领域,无人航行器、智能浮/潜标等各种无人装备也在逐渐进入人们的视野,并取得了飞速发展。
水下不连续小目标探测,是海洋地球物理领域比较前沿的课题。以声、光、电、磁几种原理为基础设计、开发的传统海洋地球物理技术手段由于环境的复杂性、原理的局限性以及高昂的施工成本等原因,在水下不连续小目标探测尤其是水下浅埋不连续小目标探测方面均存在较大的不足,因此海洋技术领域亟需新思路指导下设计的新体制设备或新型作业方法。
今天,就和大家聊一聊这两方面的话题,以及我从海洋技术角度对水下不连续小目标探测问题未来解决方案的一些思考。
无人系统
说到无人系统,可能大家首先想到的就是各种军用无人机、无人战车、无人潜航器。
以及各种各样的“文工团”。



而在更广阔的工业领域中,无人系统的应用又是什么样的呢?
我们可以看到替代农机操作员的各种植保无人机、无人车,替代产线工人的机械手、室内运输车,以及替代电网巡线员翻山越岭爬高塔的巡检机器人。
简言之,无人系统的使用场景或者任务内容可以概括为:
Ø代替从业者执行劳动强度大、安全风险高的工作;
Ø代替从业者执行重复性、长周期的工作;
Ø取代部分施工成本高、人力投入大的工作模式或方法。
这里给大家推荐一部电影“安德的游戏”,根据美国著名科幻小说作家奥森·斯科特·卡德(Orson Scott Card)1985年发表的科幻小说《安德的游戏》改编,原著小说对未来太空作战进行了非常大胆的设想:指挥官通过通信系统建立的数据链,在后方利用能够全面反映战场态势、敌我双方状态的交互系统来控制无人机群与敌方作战。影片中对这一场景也有非常宏大的视效体现,而近年来投入实战的各种军用无人系统在总体上也表现出了相似的形态,那就是“无人系统作为整个系统的执行端,通过人在回路的方式执行各种既定任务”。
说了这么多,无人系统到底该如何定义呢?
无人系统是指具有一定自治能力和自主性的无人控制系统,它是人工智能与机器人技术以及实时控制决策系统相结合的产物。
正因为无人系统在工业体系中的应用使相关行业提高了效率、降低了成本同时改善了劳动强度、作业风险等相关的用户体验,符合我国产业升级、“新旧动能转化”的方向,国务院于2017年7月发布了《新一代人工智能发展规划》,把无人机、无人车、无人船等无人系统列入国家战略发展的重点任务。
早期在高校、科研院所中进行的生物行为学、仿生学研究,控制理论研究以及作为基础的数理逻辑学研究支撑了无人系统技术逻辑的底层基础,而在大数据、数字经济、产业技术升级换代的商业逻辑带动下,各种应用驱动使无人系统得到了长足发展。
那么无人系统通常是由哪几部分组成的呢?
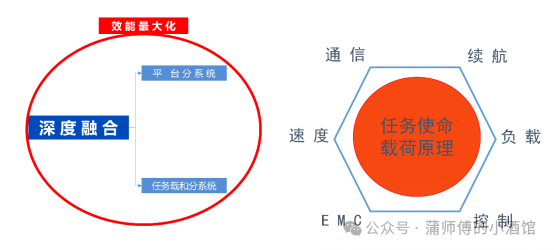
从功能、应用的角度出发,所有的无人系统,都可以将其划分为平台分系统(简称平台)和任务载荷分系统(简称任务载荷)两大部分。平台为任务载荷提供必要的容纳空间、机动能力、防护条件、能源供给以及与控制端交互的数据链等保障条件,任务载荷则为整个系统的任务使命、功能实现提供必要的硬件、软件基础,二者密不可分。
因此,所有无人系统的核心技术都是围绕任务使命,以功能开发、应用设计为主体的系统集成和应用,追求平台与任务载荷深度融合,以功能最大化和系统效能最优为首要考虑。
而现阶段无人系统的工作方式就像前文所说的,以“人在回路、人工决策”为主。
水下不连续小目标探测
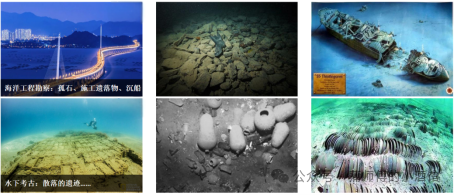
水下不连续小目标,是指赋存于水体或海床以下一定深度,体量小或与背景场差异性不突出的孤立物体。如木质沉船、孤石、施工废弃结构物、水雷等。
水下不连续小目标探测是海洋工程勘察、海洋军事应用中的难点,通常使用声学、磁法等方式进行,通过调查船拖曳主动声呐、磁探仪等设备,按预设测线进行扫测。
此类目标具有物理体量小、分布随机性强、赋存环境复杂以及与背景场差异不明显等特点,因此在海洋地球物理领域尤其是海底探测技术方面是一个令人头疼的问题。
海洋地球物理的基本原理是位/场理论,“位”代表空间位置,“场”代表某种物理场的强弱,即利用天然物理场可探测,具有连续性、不均匀性等特点,对不同物理场的差异性进行捕捉、处理和分析、识别。如重力场、地磁场、地电场、地温场、海洋声场等。因此精确定位和对特征场强的准确量测就是海洋地球物理方法的核心问题,具体表现在空间位置、时间的绝对精度,量程、分辨力的平衡,以及对目标和背景场差异性识别三个方面。
而针对悬浮、坐底、浅埋的静态目标,通常采用的是声学探测、磁探(梯度交汇法)的手段。
这里重点说一下针对水下浅埋不连续小目标的声学探测技术。传统的浅剖只能生成沿航迹方向的二维声学地层图像,众所周不知,二维剖面在判断地质体规模、探测特征明显的连续目标方面尚可,但搜索不连续小目标时就存在一定局限性了,具体表现为测线密度有限、空间分辨力不足,或施工效率低得令人心碎。
于是针对水下浅埋不连续小目标探测这种需求,就发展出了三维浅地层剖面探测技术。
目前三维浅地层剖面探测技术(简称三维浅剖)主要用于水下浅埋目标物精细探测,从本世纪初以来发展出坐底式和走航式两种模式。
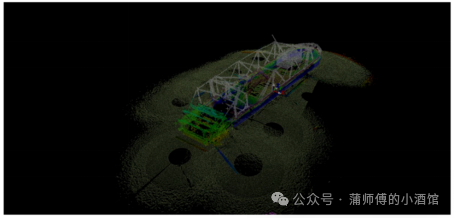
坐底式三维浅剖通常采用施工船吊放、逐站落底探测的方式作业,主要采用两个收发一体的线性阵换能器沿导轨逐点激发、接收,然后通过导轨圆周式转动,将单点数据叠加,形成圆内下方一定深度的浅地层信息。坐底式三维浅剖主要用于水下施工场区地质环境的精密探测,如平台插桩点埋藏障碍物探测,水下遗迹开采区选点探测等。
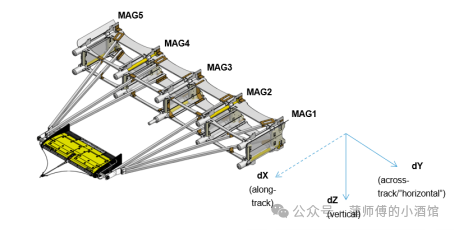
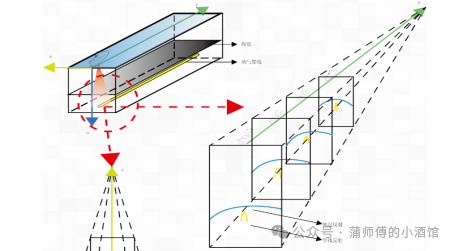
走航式三维浅剖多为线性震源与排架式多点接收阵或多通道横列接收阵组成,部分加入合成孔径成像算法,航行过程中发射、接收声信号实现测线正下方一定宽度地层的三维剖面成像。具体施工过程为:采用拖曳式或与搭载平台刚性安装的方式走航式作业。
目前已完成产品化的走航式三维浅剖主要有以下两种:
Ø采用线性低频震源与刚性排架式多点接收阵组合而成,可定义为类多道地震模式;
Ø采用线性低频震源与横向多通道线阵组合而成,部分型号还运用了合成孔径技术,可定义为类多波束模式。
从原理上来说,两种模式的走航式三维浅剖都是利用一定开角的震源发射声信号,接收阵采集回波信号,生成航迹下方一定宽度海床的横向剖面,结合搭载平台的平面位置、姿态信息对数据进行融合、校正处理,可获得航迹下方有限宽度海底的连续三维剖面信息。走航式三维浅剖主要用于海底管缆赋存状态检测、水下考古、扫雷等领域,相较于只能生成航迹下方二维声学图像的传统浅剖,其特点为分辨力和施工效率较高,但系统复杂、数据处理难度较大。
而且还贼贵……尤其是数据处理软件……
那么,就目前比较old school又“经济实惠”的技术方法,水下浅埋不连续小目标探测是否也有解决方案呢?
答案是肯定的。
在某近海水下考古项目中,载人调查船搭载多波束条带测深系统、侧扫声呐,两艘无人船搭载导航定位系统和参量阵浅地层剖面仪,三者呈“品”字形同步机动,载人调查船采集测区水深地形、海底地貌数据,无人船采集测区浅地层剖面数据。当载人调查船声呐操作人员在声学图像上发现可疑目标后,现场提取目标坐标,然后无人船操控人员向无人船发送以目标位置为交点规划的“十”字形或“米”字形正交测线任务,确保无人船可在目标正上方多次通过,无人船自动驶向预设点位,抵达后对水下目标进行加密探测、精细测量。
用这种方法找到了一条沉船和一个集装箱。
正所谓杀猪杀屁股——各有各的杀法~
趋势的猜想与展望
针对水下不连续小目标探测的应用,我认为无人系统的发展应当是:
Ø分散式系统——具有区域自组织能力,即使发生失效也可以做到性能下降但功能不损失;
Ø异构集群——水面、水下跨介质组网,实现大面积快速扫测和抵近观察精细探测相结合;
Ø边缘计算——克服水声通信低带宽的问题,使水下无人系统能够通过集成的声学、光学载荷自主识别目标;
Ø新型任务载荷——分布式系统,前置处理、即测即显,提高作业效率,降低对现场操作人员的要求。
这里重点说一下“边缘计算”和“新型任务载荷”。目前主流的探测类任务载荷中,以扫描声呐、图像声呐的数据量最大,通常可达40MB/s以上,远超过目前无线通信系统的带宽,对于水声通信更是大象钻蚂蚁洞,因此现场施工时主要采用本地保存原始数据,通过远程桌面监控设备状态甚至回收后下载回放、处理的方式进行作业。
这种方式对于数据实时性要求较高的任务、多平台协同作业场景存在一定的不便性。尤其是异构平台集群协同作业,如果仍采用这种方式,综合考虑受海况制约的作业时间窗口,效率会大打折扣。
基于网络架构的分布式任务载荷,可实现原始数据本地保存的同时,将前端处理后的关键信息进行提取,回传至控制端,然后通过UI进行集中显示,可大大提高数据实时性和系统使用便捷性。如果前端有足够的算力,平台甚至可以自主对疑似目标进行抵近观察、加密探测。
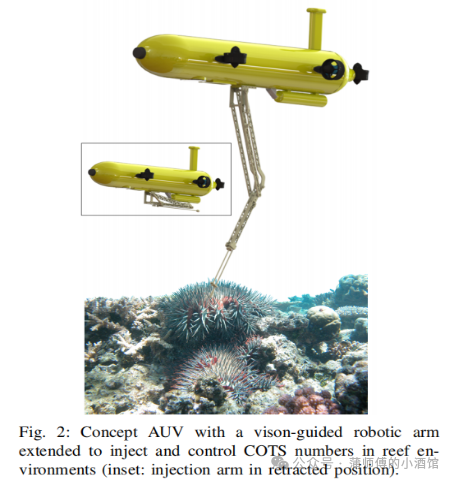
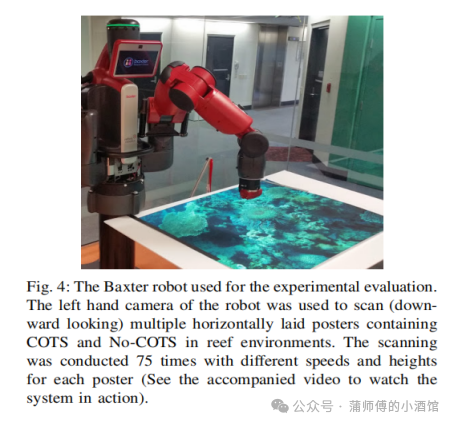
这里举个例子,澳大利亚为了治理危害珊瑚的长棘海星,用搭载了水下高光谱和机械手的AUV,通过机器学习使这些AUV可以自动识别长棘海星,然后用机械手给海星注射胆盐,杀死它们。
这些关键技术如果能够实现,就可以设计出高效、低成本的系统方案。就好像“鸽群”,领头的鸽子是年富力强、经验丰富的壮年鸽子,其他跟飞的鸽子就不一定了,那么我们用少量高成本的USV或AUV在前端做探测,然后把目标点信息分发给相对低成本的AUV并为其导航,最后由这些便宜的AUV去执行相对高风险的任务。
比如扫猎雷这种典型任务,扫雷舰或岸基作为控制端,配合以USV+AUV集群作为执行端的任务系统,以区域本底数据作为参考基线,USV负责大范围扫测、发现疑似目标,AUV可在水下抵近观察、小范围精细探测,同时USV和AUV区域组网,USV为AUV进行指引、导航,二者同时搜索目标,AUV具有抵近自主识别目标的能力,利用声学、光学、电磁法等多种海洋地球物理手段相结合的方式提高搜索效率。
今天的内容就到这里,祝大家愉快~