上回书说了固定观测平台,今天聊聊机动平台。
要说机动平台,首先还是从任务目的出发——为啥要机动?
机动平台的主要任内容如下:
Ø利用由主/被动声学、光学、重磁测量设备等单一或组合形成的任务载荷系统,按照预设测线循线航行,或按照预设坐标自守位,执行海洋地球物理探测、海洋测绘、海洋生物观测等任务;
Ø利用由浪、流测量设备、接触式海洋化学传感器、气象观测设备等组合形成的任务载荷系统,按照预设站位逐站驻留,或按照预设测线循线航行,执行海洋气象、海洋水文、海洋生&化观测等任务。
上一篇文章讲的固定观测平台和技术方法,主要解决海洋环境要素数据的时间连续性问题,而机动则是为了解决数据的空间连续性问题。不论是否具备主动机动能力,机动平台在工作过程中随着空间位置的改变,可以获取与空间位置相关的数据,进而描述各种海洋环境要素的空间赋存状态。
能够搭载各种载荷进行海洋环境要素数据采集的机动平台有很多,大到调查船、卫星、飞行器、载人潜航器,小到滑翔器(GLIDAR)、无人水下航行器(ROV、AUV)、无人水面航行器(USV)、漂流浮标。
这一展开涉及的学科、专业可就有点多了,甚至包括之前提到的船舶与海洋工程,似乎又会让部分读者产生关于“海洋技术”边界问题的困扰。
所以今天蒲师傅就聚焦在无人水面航行器(Unmanned Surface Vehicle),通过一个点展开,力争把机动平台的特点给大家掰扯清楚。
无人水面航行器(USV),通常被比较通俗化地称为
“无(kao)人(hai)船(xian)”。
说起无人船我相信很多人脑中会蹦出俄乌冲突中K.O.俄军大量水面舰艇、海上设施的乌克兰自杀式遥控无人船。
主体复合材料,汽油发动机、喷泵推进,双光光电吊舱,星链平板天线,艏尖舱内塞满高爆炸药,一切都那么朴实无华,要不是俄军电子战水平太拉胯,很难想象这么个小逼噶能掀起啥大风浪来……
言归正传,虽然用途不同,但不影响我们把这玩儿作为样本进行分析。
由此不难看出,无人船作为一种新型技术手段目前已在海洋调测和防务领域广泛应用。简单来说无人船就是一种具有一定机动能力的水面自主、半自主、遥控搭载体。
传统船舶大量设计工作集中在“维生系统”方面,也就是说要保障乘员的生存、生活基本条件,简言之,无人船就是去掉了维生系统,通过控制系统软硬件及配套的环境感知设备、执行机构等来替代船舶上人的工作,去执行既定任务。因此,无人船就可以定义为一种可执行某类指定任务,并基于任务目的进行功能、性能设计的水面机器人(或水面无人作业系统)。
既然是一种水面无人作业系统,那么适用于海洋调查领域,针对海洋环境要素数据采集任务设计的无人船关键技术有哪些呢?
围绕任务目的、载荷原理、使用环境特点,以应用为导向、功能开发为主体进行系统设计,其关键技术包括:
(1)特型平台设计技术
围绕任务载荷原理、使用要求、作业方法等,对平台进行针对性设计,如振噪抑制、削弱航行扰动、动稳性优化、电磁兼容性优化等。
常规海洋调查任务使用的仪器设备多为声学、光学、电磁传感器。无人船吃水浅、布置空间紧凑,因此各种仪器设备容易受到平台振动、噪声、航行过程中的晃动和产生的水花、高含气附面层以及电磁辐射和动力系统排放等因素的影响,造成数据质量和作业效率下降。因此在无人船设计方面,需要从系统效能的角度出发,围绕任务载荷的原理和对工作环境的要求,从线形和结构设计、载荷布置方式、动力系统选型、推进装置优化、运动控制策略设计、供电系统设计等方面进行有针对性的特殊设计和处理。
(2)强扰动环境下的运动控制技术
针对海洋动力环境中风、浪、流对水面航行器的影响,开发欠驱动运动控制算法,实现如高精度循线航行、高海况自航、自守位等功能。
例如循线走航探测或定点自守位观测的作业方式。无人船体量小、推力有限,且属于典型的欠驱动运动体,因此容易受到海面动力因素的扰动,出现偏航距超限、航向不稳定、失速及大幅度摇动导致甲板上浪甚至倾覆的情况。因此在无人船运动控制方面,需要设计基于定位、姿态数据的前馈控制进行运动补偿,通过无人船实时位置、航速、艏向、横纵摇、升沉等数据,判断风、流的恒定扰动以及波浪的周期性扰动的强度、方向,结合无人船惯性力、阻力、恢复力建立运动模型,提前干预推力矢量输出,确保无人船能够以较高精度循线航行,或在高海况下通过艏向、推力调节确保无人船不失速或发生大幅度横摇。
(3)高动态复杂环境下的通信技术
针对高动态、多径效应影响突出的海面、水下复杂环境,开发健壮性强、稳定性好、低时延、高带宽的微波、水声通信技术。
海上通信主要依赖微波(海面)和声学(水下)两种手段。无人船上建高度有限,且体量小、吃水浅,横纵摇、升沉幅值大,微波通信设备天线距水面高度小,同时存在摇晃幅度较大时,通信距离受限的情况,且微波容易受水面多径效应影响造成信噪比下降,而水声通信由于带宽有限,往往只能进行极为有限的水下数据链支持。因此在无人船通信技术方面,需根据海洋环境的特殊性对通信系统进行设计,开发可应对高动态复杂水面环境的微波通信技术,以及更高带宽的水声通信技术,尤其是针对同构、异构平台间的多节点组网、跨介质通信,仍有较多难点需要解决。
目前无人船技术在海洋调查领域的发展日趋成熟,已经从最初的“以船为核心”,片面追求航行性能和分系统性能指标的装备集成设计,逐步走向“以任务目的为核心”,追求平台与任务载荷深度融合,以功能最大化和系统效能最优为首要考虑的系统总体设计。以目前市场份额最大的执行海底探测任务的无人船为例,具体表现为以下特点:
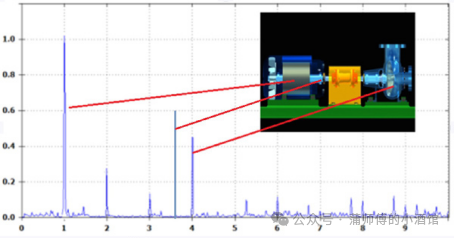
(1)充分考虑使用环境特点和任务载荷对工作环境的要求进行系统设计
海底探测主要依靠主动声学载荷,其对平台的动稳性和航行扰动要求较高,甚至直接影响探测数据质量和作业效率,因此针对特定海洋动力环境,努力提升无人船动稳性,同时尽量降低平台对声学载荷的航行扰动就显得尤为重要。如法国Ixblue公司推出的“DriX”海底探测无人船,采用小水线面半潜船型配合吊舱搭载主动声学探测系统,实现在规则波扰动下具有较好动稳性的同时,声学载荷处于一个低振噪的良好工况。
(2)对客户使用成本的考虑也是至关重要的
可以看到,目前主流的调测类无人船均采用模块化设计,可搭载多种类型任务载荷以实现多用途,同时为客户提供充分的扩展空间。如英国ATLAS公司开发的“ARCIMS”无人船,采用双机双推的双体船型,通过月池、升降鳍和开敞式艉甲板,可搭载多种声学载荷、磁探仪、自动拖曳系统、水下航行器支持系统等,执行近浅海水深地形测量、水下目标探测和分类等典型任务。
(3)集群化协同作业能力逐步成型
海洋调测任务的难度主要来自于天气、海况的不可控,在可作业海况条件下尽可能提高有效作业时间就成了项目运行成本控制的关键,因此在一定区域内投入多台套无人船同步/分区域作业就成为提高作业效率、降低施工成本的有效手段。这方面的典型代表就是Ocean Infinite公司使用L3-ASV公司生产的“C-Worker8”作为水面通信节点和水下导航定位支持系统,通过与搭载声学探测设备的AUV组网协同搜索马航M370残骸。
目前无人船绝大多数仍采用基于载人船配置方式的常规设计,其作业方式、使用方式也极大程度上参考了常规海洋调测船的施工惯例和模式,无人船系统的操作性、稳定性很大程度上取决于船体设计合理性、动力系统、通信系统的性能和稳定性,无人船还无法形成独立、完整的作业能力,因此现阶段无人船的运用还是作为传统技术手段的补充。
未来随着材料技术、传感器技术、智能控制技术以及相关法规的发展和完善,无人船将从一种智能化水面搭载平台逐步转变为针对某任务目的设计的作业系统,对人工干预的依赖性渐渐降低,从控制端指令驱动的系统逐步发展成事件驱动型分散式系统,初步具备独立、完整的作业能力,可替代部分传统调查手段和方法。同时随着各种针对无人平台特点研发的新型任务载荷将大幅度提升无人船作业能力,催生出更多的基于无人船应用的系统解决方案。
(1)新型平台和作业方法
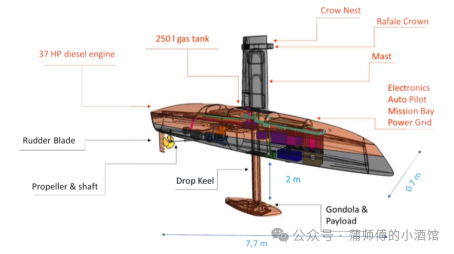
目前初见端倪的两类发展方向是新式特型平台和多智能体异构集群协同能力的扩展。新式特型平台突出单体针对特殊任务或极端环境的适应能力,如具备多模机动能力的可潜无人船,i7 Engineering公司研发的“SUBMARAN”风帆可潜无人船,该产品带有一面可收折的刚性帆,在水面时通过刚性帆调节攻角获得推力航行,在暴风浪环境下可潜入水下,然后原地驻留或利用电能航行,该类可潜无人船预计在极端气象过程观测、水下侦听等特定领域会有较大的发展;另一类发展方向是多智能体异构集群协同能力,其对跨介质通信能力、运动控制算法等的依赖度较高,虽然目前已有部分机构取得了一定进展,如Ocean Infinite公司目前正在实施的“ARMADA”计划,但针对更广阔的应用场景,技术水平仍有待提升。
(2)新型任务载荷带来的变革
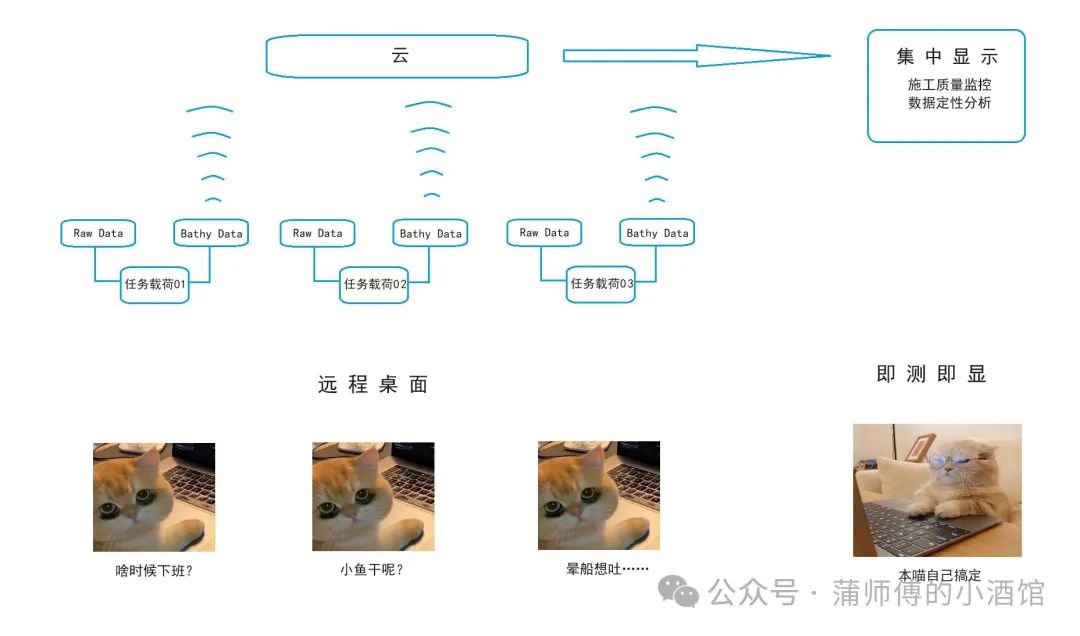
在数理基础、新材料、更强大的硬件处理能力等底层技术的发展作用下,目前涌现出大量的新体制的任务载荷。如新型主动声呐、diver、水下光学拖体、模块化可热插拔的多参数生化传感器等,这些新体制的任务载荷发展趋势指向小型化、集成化、可多模工作且价格越来越低廉,同时在人工智能的加持下,只要在执行端部署一定算力,就可以通过边缘计算对实时数据进行自动处理甚至自主分析,这些变化必定会对无人船的应用产生深远的影响。
说了这么多,现阶段无人船存在的问题有哪些呢?
(1)很多问题的根源早在OTA时就种下了
年前跟一个搞了一辈子调查船的老先生吃饭,席间聊起无人船,老先生直言“现在的无人船都太像船了……”。
设计开发一个系统,在琢磨“怎么做”之前必须必先想清楚“做什么”,也就是常说的任务导向的应用底层逻辑驱动设计。不能因为自己对什么活儿熟就按什么路子做事,大到系统总体设计,小到船型选择,都是这个道理,传统行业的经验需要辩证地看,工艺、方法方面问题的解决思路确实需要借鉴,但路径依赖也会严重影响最终产品的设计。
*.不懂OTA的请参看海测讲坛▏蒲进菁:从OTA到JDP——聊一聊海洋装备开发过程中的方法论
(2)为了高大上神化局部技术
一个装备行不行,还是得用商业上能否成功来衡量,光靠堆指标做加法搞不出好产品,请注意是“产品”,不是“科研成果”。
所有忽略系统整体一味强调单一技术先进性,都是耍流氓,这方面可能很多人跑偏了。比如说所谓的“自主控制”吧,无人船是一个欠驱动非线性多阶系统,过于强调算法作用没有卵用,因系统后端器件、执行机构等环节响应带宽太窄,阶次降不下来,系统整体响应慢算法再牛逼也没吊用。
那么无人船的未来在哪里?
既然归类到海洋技术领域,那么核心任务就是如何以更低廉的运行成本提供高精度、高准度的观测、探测数据。从这点出发,我认为现阶段可以先尝试攻关以下方向:
(1)小型智能化甲板机械、伺服机构设计开发
海洋调测所需甲板机械、伺服机构包括绞车和A型架/桁架(自动拖曳系统)、水面及水下升降机构、回收时所需的辅助接驳和止荡机构、自稳装置、水下转台等,是执行常规海洋调查任务的必须辅助装备,有了这些家伙事儿,无人船的能力才能更接近载人调查船。
But,一方面无人船体量小,船上布置空间、有效载荷有限,因此必须考虑机构的小型化、轻量化;同时,由于缺少人的干预,这些机构的动作规划、执行都需要更高的准确性、鲁棒性;再次,无人船干舷低,易湿甲板,因此机械结构的防水、防腐、耐盐雾等环境耐受性指标要远高于传统有人船上的装备。比如LIDAN公司专门为执行海底探测任务的无人船开发的侧扫声呐LARS,伸缩式单臂配合被动止挡器,结构简洁、装载空间小、重心低,可以说骨骼清奇。
(2)原生海洋能作为直接动力的无人船设计开发