|
% O0 { c) T# v( ~' q
原标题:测绘通报 | 三维激光扫描技术在历史建筑立面测绘中的应用 ! d/ Q2 g h! ?
孔令惠1,陆德中2,叶飞3
: b" W, l v# U( X- P/ R (1.黄河水利职业技术学院,河南开封475000;2.长江委水文局长江下游水文水资源勘测局,江苏南京210000;3.武汉天宝耐特科技有限公司,湖北武汉 430023)
2 Y9 e0 t& n$ V" Z/ H" R* K0 M0 ^ 摘要:随着现代化科技手段的进步与更新,利用三维激光扫描实景复制新型技术原理替代传统式单点立面测绘的技术手段,对历史建筑进行保护,能最大化节省人工成本,提高工作效率。能够将细节、精度、效率统一达到产能最大化,也能提供更高级且全面的原始数据存档及成果交付方式,不断更新历史建筑数字化的技术标准。 3 S3 b4 L6 m# N7 X
关键词:三维激光扫描;历史建筑;立面测绘
2 ~6 e* ~* m& w2 d _ 为完成城市的历史文化街区改造和历史建筑划定的工作要求,各住建部门制定了《多种历史建 筑划定工作方案》,充分肯定了历史文化街区改造和历史建筑划定工作的重要性。在此项工作中,建筑立面的测绘与存档是重中之重,是原始数据的存储及未来历史建筑维护修缮的重要基础。传统的工作模式为使用全站仪、测距仪、皮尺、相机等设备,人工采集建筑立面关键位置的三维坐标,但已逐渐显得效率低下。
3 N) @& G2 I- v. b: e 三维激光扫描技术主要是利用传统的手持激 光测距原理获取目标数据,可用于常规的变形监测、建筑工程测量、地形地籍测绘、古建筑文物保护等多领域,具备无接触合作目标、高精度、高密度、 高效率等优点[1] 。随着三维激光扫描技术的发展,大量的研究证明,其在城市轨道高精度变形检测、高精度测角和测距等多领域精度试验分析中具有 可行性[2]。随着研究分析的拓展及应用,其技术在建筑立面数据采集中得到广泛的应用,这不仅 在建筑立面获取和绘制方面具有良好的效果,还开拓了立面照明设计行业的应用[3]。因此,不仅解决了遮挡区域的数据问题,而且在测量效率化、精度化、自动化及不接触性等方面均表现出极大的优势[4]。
u" k1 y. A) l$ r/ { 本文主要针对Trimble TX8三维激光扫描仪的外业作业流程、Trimble RealWorks内业点云数据配准及处理方法、立面点云数据快速成图方法及精度情况[5],通过实际数据进行试验,总结该技术的优势和存在的问题。
. R+ e0 e$ o- v |: O4 M9 Y9 S 1 三维激光扫描技术的原理及方法
$ \+ \9 Z! y" \2 j/ w% w 1.1 工作原理 ' N$ P9 _9 `% j8 k0 o n5 U v1 C0 B
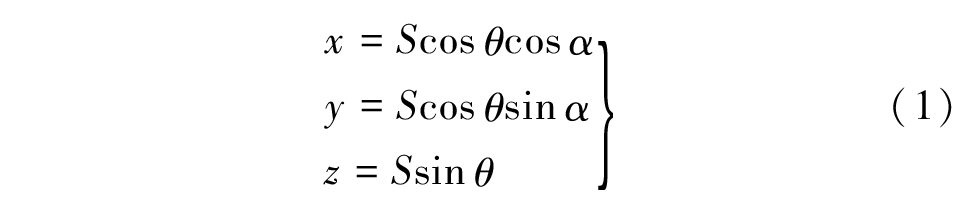
三维激光扫描技术又称为三维激光扫描系统,包括激光测距和激光扫描两个系统,在主机内通过内置反射镜有序快速地旋转,将激光发射器发出的激光点有序地扫过扫描区域,激光点发出后利用经 扫描物体的表面返回至仪器之间的空间相位差计算距离,同时控制扫描模块并测量每个激光点的角度,从而计算出激光点在被测物体上的三维坐标,获取被测物体表面的所有三维信息,最终输出完整的三维数据。在地面三维激光扫描测量系统对物体进行扫描后,采集到的物体表面的空间位置信息是以扫描的相对坐标系(坐标原点位于激光束发射处,在主机镜头中心,扫描仪的竖直轴(水平时的天顶方向)为Z轴,扫描仪的水平轴的零方向为X轴,Y轴与X轴、Z轴构成右手坐标系)为基准的。 . x ?5 q6 ?+ U; { q# O
如单个采集点,原点到扫描物体点的距离为S,扫描仪测量的水平和竖直角分别为α和θ,则被测点在扫描坐标系中的坐标可表示为: ' c- B! B' g! v$ y
! Q0 L" Z( M* Q$ ]$ I# y1 w 1.2 点云数据处理方法 # a: P: s9 h9 x& h9 t
完成现场数据采集后,需要经过点云数据预处理,才能进行古建筑的精细建模。 - s8 r$ J1 W, q( w2 C9 o
点云数据预处理一般包括点云数据配准及坐标系转换、去噪、滤波及点云分割4个过程;精细建模一般经历点阶段、多边形阶段及曲面阶段的过程。 : c% x5 h+ t) z( i* S" ~/ u: ~
2 古建筑实例分享7 j( C4 E I) Z# X; L! y u
2.1 项目概况
" P4 Y( @0 ~- M$ M# j; ? 本文研究对象均位于浙江省宁波市,为浙江省宁波市“历史建筑测绘建档是为历史建筑维护修缮、保护利用、迁移保护和重建等提供准确全面的数字信息”的实施项目。其中,一个为塔形建筑,另一个为两层立式的西洋建筑,其周边均为繁华街区,车辆行人络绎不绝,若实施传统单点测绘或无人机测绘均存在效率低下、精度不佳的情况。 % R" z& n9 m7 H. Z8 k6 Y5 m5 j
2.2 外业数据采集 2 b; A5 O. [! j1 j' C
三维激光扫描的外业数据采集工作主要包括:扫描测站的设置、点云数据的获取及点云数据的后处理。扫描工作进行前需要对被测物体及其周边环境进行调查,在利用一个测站无法获取完整物体信息的情况下,可以架设多个站点对被测物体进行扫描。单个站点与相邻站点扫描区域有部分重合要求,以便于后期点云数据的测站配准[6]。架设相邻测站通常需要保留30%以上的区域重合,区域重合越大,配准精准度越高,因此在实际的项目中,需要根据现场场景的需求设置合适数量的扫描站点。可根据建筑物的实际情况,如塔形建筑物可在其四周设置多个测站,对建筑物的各个立面进行全方位扫描和数据采集。
- \3 @" C) p g7 S. r$ o B Trimble TX8的操作面板具备现场浏览数据与质量检查操作的功能,如图1所示。可实时缩放、检查数据质量情况,保障三维数据的质量与完整性。 . J6 G9 W4 C& _& L8 `
 图1 三维激光扫描仪现场数据实时预览 图1 三维激光扫描仪现场数据实时预览
2 D f4 O3 Q" L7 K; M* Z
2.3 内业点云数据的配置 : }4 F8 M f+ R, w/ Z: M/ s
点云配准分为两种方法:基于测站的拼接和基于目标或点云的拼接[7]。第一种方法要建立测站点,进行控制测量,相当于传统测绘的碎部测量,而点云的数据质量与该测站的站点位置和扫描质量有关,但需要三维激光扫描仪具有整平、定向和对中的功能。第二种方法至少需要3个同名特征点,将相邻测站的点云进 行配准,同名特征点可以是标靶或典型角点。特征点的提取方法:
* z- j: [% P' j3 e$ P ①可以通过选取规则的几何模型求交点自动提取特征点 [8] ; 3 U6 h8 N% m, ?$ u) ]9 s
②如果选取的特征点所在位置比较明显,也可采用鼠标 直接点击的方式选取。 . j3 c! d/ m3 n; F0 C- ^
第一种方法获得特征点的精度较高。采用同名特征点配准,可通过六参数转 换模型将各个测站的点云坐标转换至统一坐标系,公式为:
1 L& M, U) j8 k' l 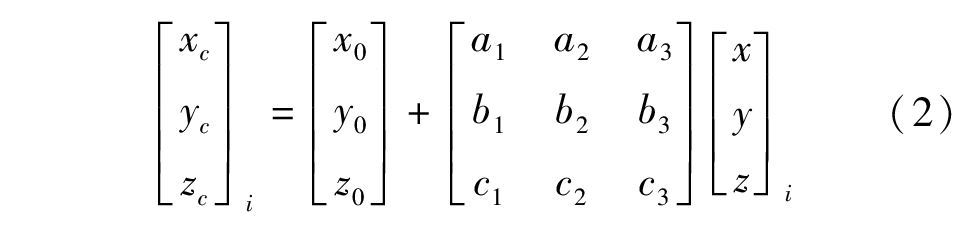
( D8 A! e" h/ t1 s! B9 P$ q
式中,(x0,y0,z0)i 为统一坐标系中的点云坐标;(x0,y0,z0)为仪器中相对坐标系的点云坐标为两坐标系之间的旋转矩阵,主要由3个旋转角度(φ,ω,κ)确定;(x,y,z)i为仪器相对坐标系的原点在统一坐标系中的坐标。转换所需6个参数x0、y0、z0、φ、ω、κ的确定至少需要两个同名 特征点,采用最小二乘平差的方法进行解算[9] 。
+ @2 L8 D5 u, b3 \# a6 W 
' ~/ \/ n' V7 m! ?! C) x) b8 G 2.4 内业点云数据的坐标转换 9 {% B5 P0 E9 a6 o( B5 e' k
仪器统一坐标系属于右手直角坐标系,设坐标为(x c, y c ,z c );局部坐标系属于左手直角坐标系,设 坐标为(x′,y′,h) i ,则可通过四参数进行坐标转换,公式为: & p w8 b% h% _$ u# U: D" j
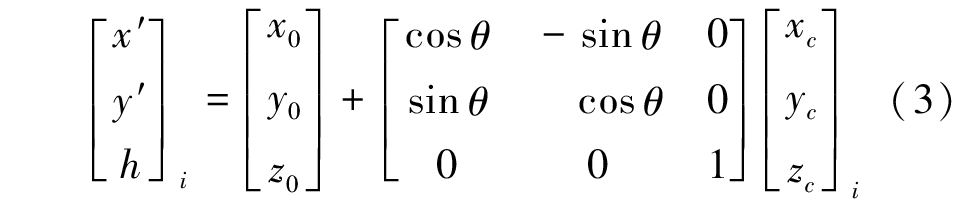
( i V# L* Q3 ?5 Z6 r' E 式中,θ为绕z轴旋转的旋转角参数[10]。
: e$ k1 E9 N5 Y- \, N3 E* B 由此可知,只要已知2个控制点坐标即能计算 出转换参数,实现坐标转换。当公共点的个数n ≥ 2,采用最小二乘法计算转换参数,同时也可以检核 坐标转换精度,公式为: 5 M* g1 z4 r9 x8 D/ C# D% s

& \! `+ g9 q$ ^ 式中,;n为 控制点的个数。σm 的值越大,转换坐标精度越差;反之,σm越小,转换坐标精度越高[11] 。
. |* o8 D' D3 l! q 
- H4 K3 X6 Y0 B4 W
2.5 内业点云数据预处理
7 o4 b% F) {$ B 在外业数据采集的基础上,获得完整的古建筑 三维点云数据,以及内业数据处理是古建筑测绘工作中的重要环节,从而为实现实体建筑的第一手原始数据存档奠定基础,然后进行数据的二次分析与处理,主要包括坐标转换、数据配准、去噪平滑、精简压缩、点云切割及CAD成图等,最终实现实景复制版立面图的绘制。 * p/ E b( w3 x, \ k$ }3 ?
完成外业的数据采集,在通过点云配准和坐标系转换后,才能实现后期详细的数据处理,输出完整的三维点云数据[12],如图2所示。 5 S4 {- H4 N |) f' [7 q6 z
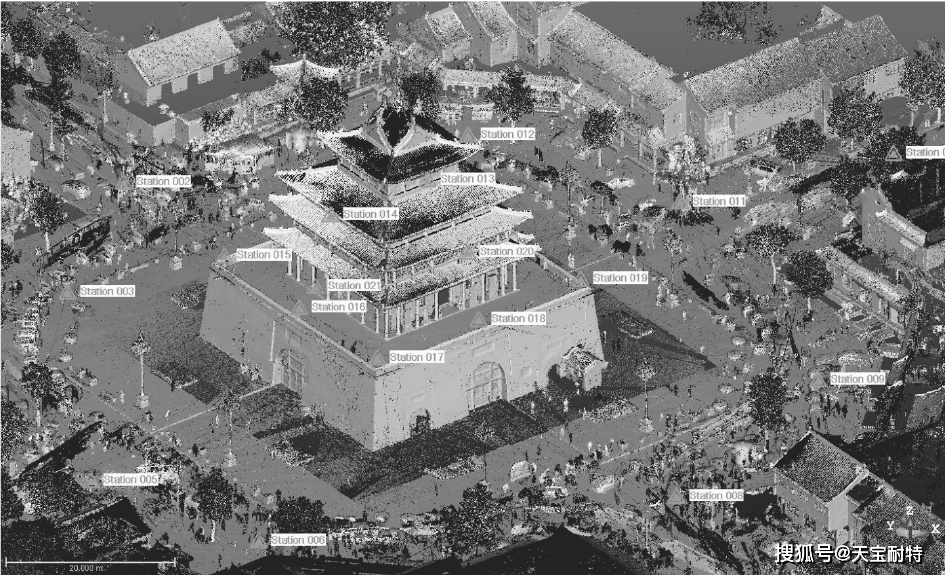 图2 完整的古建筑三维点云数据 图2 完整的古建筑三维点云数据
0 O/ \8 |/ o) N2 r 图3为古建筑屋顶细部原始点云处理与精细化切割后的样式,可见精细化后纹理自然,形式逼真。图4为对古建筑进行模型平滑与填充处理后的效果,其特征明显,立体化效果显著[13] 。图5为对古建筑在某一断面进行剖切后的纵横断面效果,其尺寸可量测,细部处理效果显著。图6为点云处理后 边界修复与绘制的效果,原始建筑的损坏之处得到修复,非常逼真完美,可以作为修缮的依据。 3 ~/ | b# p. ^7 d& \
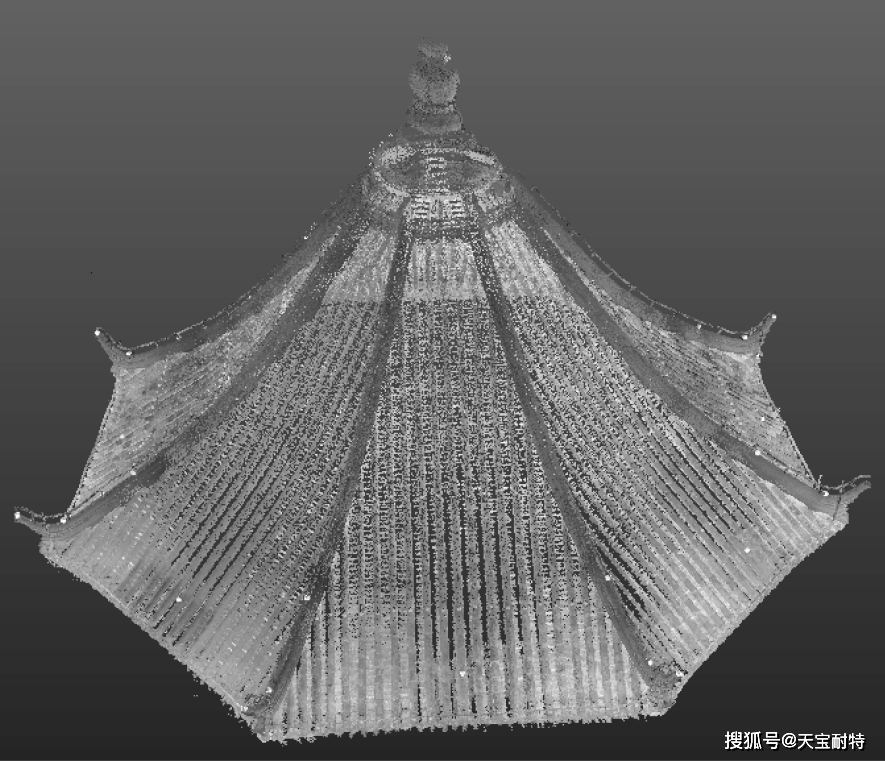 图3 原始点云处理与精细化切割 图3 原始点云处理与精细化切割
$ S; Q* a" @1 T" o' G0 c 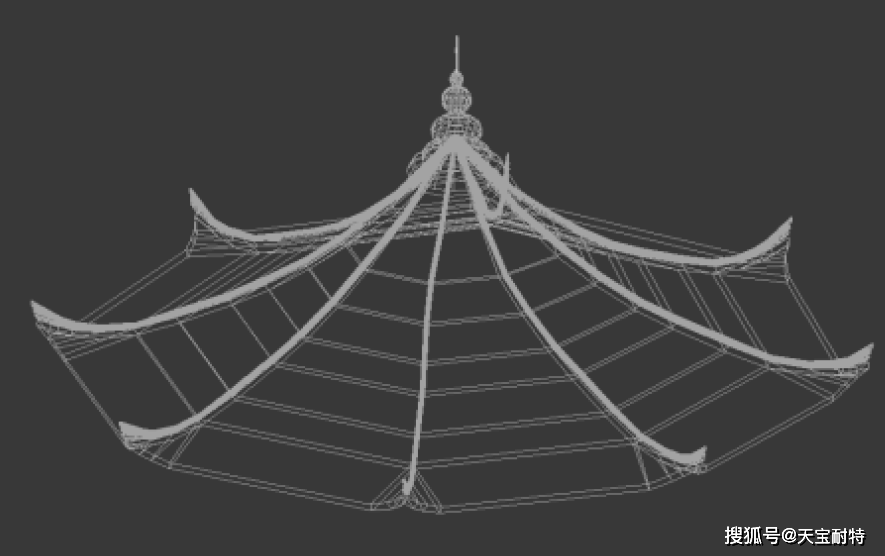 图4 处理后三角网模型平滑与填充 图4 处理后三角网模型平滑与填充
- X7 Q! }$ Y6 ~0 L6 v 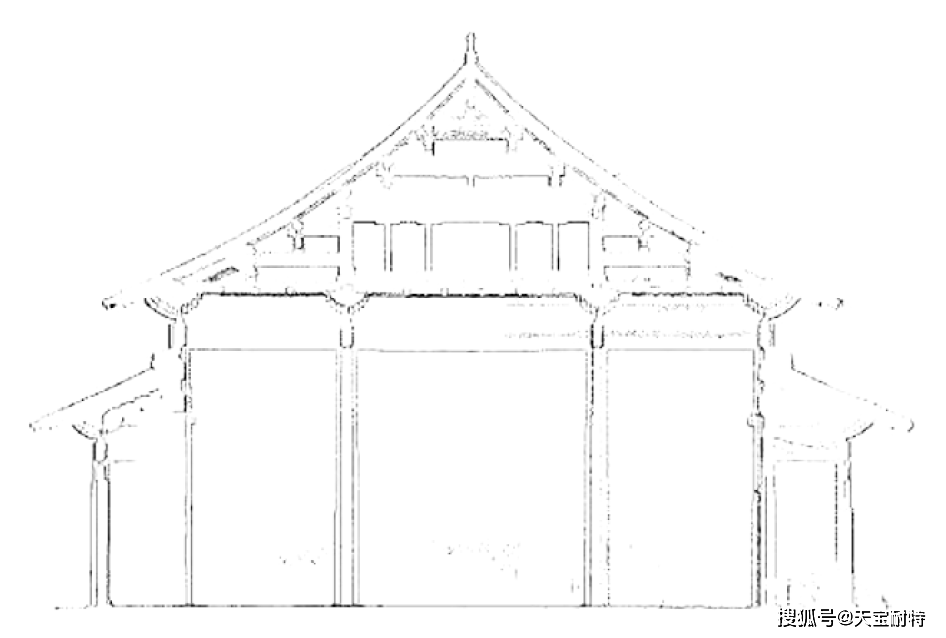 图5 原始点云纵横断面分割与处理 图5 原始点云纵横断面分割与处理
; S' } b6 f1 Y& R6 a, c1 c9 X 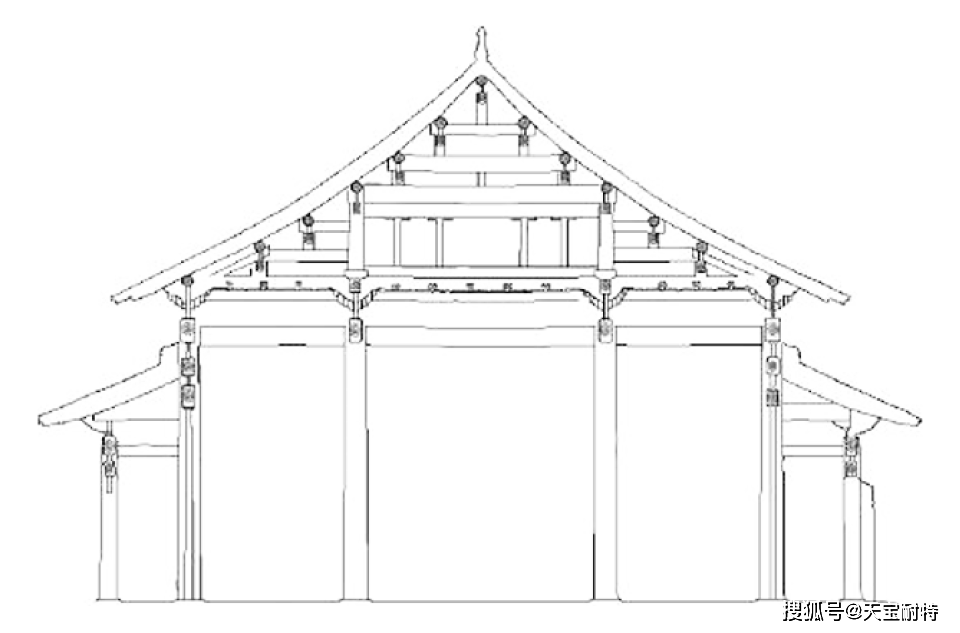 图6 点云边界修复处理与绘制后效果 图6 点云边界修复处理与绘制后效果
& V$ {+ e6 I( ^2 y S2 K 2.6 立面点云数据的快速成图 , w! \( i0 g4 `1 L/ `4 b1 E
将Trimble RealWorks软件输出的RCP格式的 点云数据导入AutoCAD软件中,首先调整坐标系,自动显示当前绘制的立面数据;然后通过软件自带的点云多RGB显示信息功能,对图形进行调整,即可实现实景现场复制式点云描图。图7为导入AutoCAD软件的立面显示效果。 7 g* y$ ?* u+ R( i3 d( g
 图7 原始三维点云导入AutoCAD立面显示 图7 原始三维点云导入AutoCAD立面显示
" X+ _3 r2 z/ a* s 再对所有直线线条、两边拾取端点进行画线,曲线线条通过选择拟合的形式进行连线绘图,将外形描绘成立面图并辅以颜色、纹理和材质,形成与实地相似的立面图,即仿真立面效果图,如图8所示。 ; U" N6 y& C6 b/ M4 e9 `' n- ]
 图8 立面图绘制 图8 立面图绘制
2 Y a% E$ Q6 V& j0 Y 根据细节上的差异,如图形不够完美,则可再对图幅、图面进行局部尺寸的调整,如图9所示。
) k' o; ~! n2 Y5 u0 s 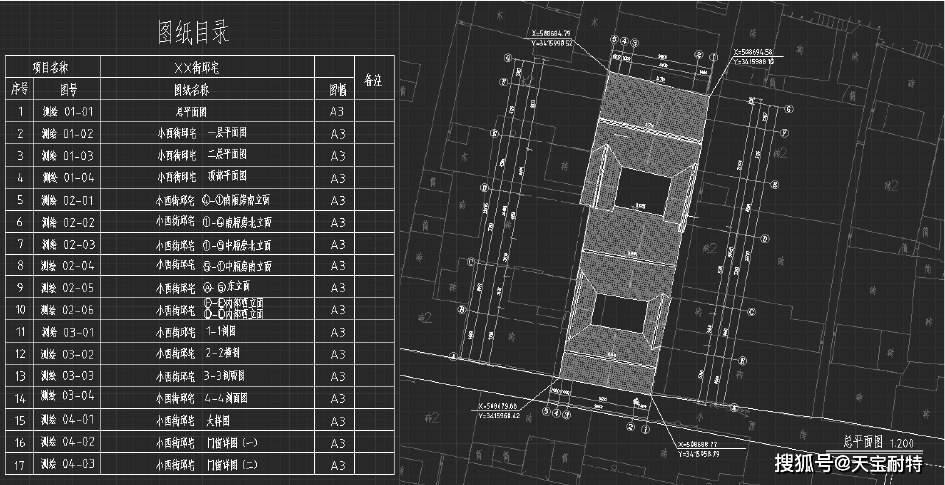 图9 图幅整理与图面调整 图9 图幅整理与图面调整
' Q: o" K ~3 M O1 x 2.7 误差统计与分析 8 D/ o) H. D) R/ R
对两个案例的点云数据和模型数据分别选取若干条边进行对比分析[5] ,见表1。由表1可知,测得数据精度均符合《地面三维激光扫描作业技术规程》(CH/Z 3017——7015)中限差的要求[14] 。 0 T" }$ d3 i& G2 w, }
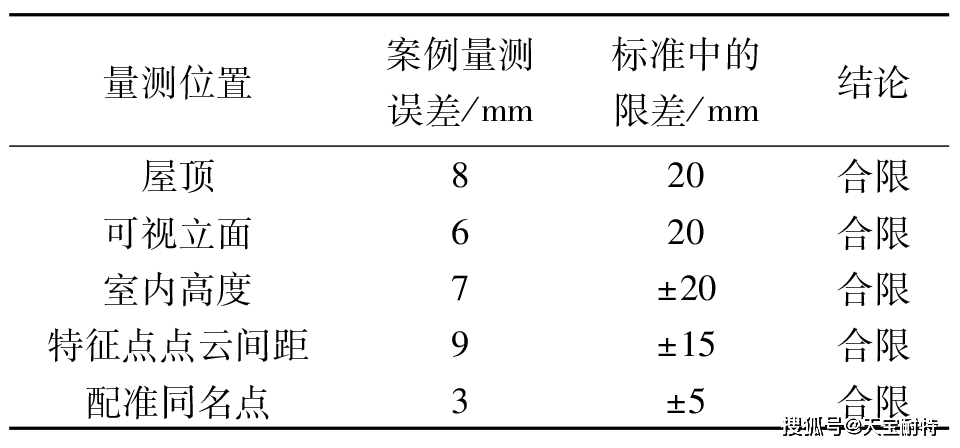 表1 量测数据精度与限差对比 表1 量测数据精度与限差对比
3 [: k$ b% X( j2 k; g 3 结语6 y! l1 X+ i8 ~+ Z
传统的立面测量方式通常采用手工皮尺测量、 手持测距仪测量、全站仪单点定位测量3种方式,实际应用中效率低、成本高。采用激光扫描仪进行外业扫描数据的采集,内业点云数据采用软件自动处 理进行预处理,体现了高效率和精准化,大大节约 了时间,但在由点云到线划的阶段,仍然需要连点绘线的绘图操作,没有实现全过程的现代化,这是未来提高效率的关键因素。 * q2 W3 }4 k; y5 D
通过三维扫描获取的原始资料,与传统停留在二维信息、单点采集相比,三维激光扫描技术不仅提高了立面测量的工作效率和数据精度,还带动了历史建筑存档与原始数据留存的革命更新,真正意义上实现了由二维到三维空间信息的升级与突破。 $ h8 S+ M+ k1 Z% |
参考文献:
~0 i, [% m) F" \. s6 H [1] 徐源强,高井祥,王坚.三维激光扫描技术[J].测绘信息与工程,2010,35(4):5-6. 0 P1 T/ a& m# Z0 I
[2] 刘胜男,陶钧.地面三维激光扫描仪测量精度的评价分析[J].测绘通报,2020(10):164-166. 7 h# z0 x, C1 w' Z* f, ?
[3] 公羽,陈义.不同扫描方式对平面标靶拟合精度的影响[J].测绘与空间地理信息,2014,37(2):77-79. * G' j6 D1 B0 V3 U% a- f2 _
[4] 唐汝煊.关于三维激光扫描技术在地质测绘和工程测量中的综合应用[J]. 信息系统工程,2020 (7):67-68. / h+ C% N1 N- R5 |/ Q" o
[5] 邓丽.三维激光扫描技术在地质测绘和工程测量中的综合应用探讨[J]. 世界有色金属,2021 (8):159-160. 8 }7 d6 @* }9 L B0 N6 P9 }5 h
[6] 张涵.工程测量中地面三维激光扫描技术的应用分析[J].技术与市场,2021,28(4):103-104. 4 ~3 w& ^* y, p9 J! ]" \
[7] 杨凯,罗意,吴坤泽.基于地面三维激光扫描数据配准方法研究[J].经纬天地,2016(1):40-43.
: H+ ]( }( [. F$ Z+ I1 h0 s [8] 袁丰波,孙攀,张少伟.地面三维激光扫描技术在工程测量中的应用[J].住宅与房地产,2020(24):215. 2 J0 M3 A) \" D- d6 X
[9] 朱曙光,何宽.徕卡三维激光扫描仪拼接方法研究 [C]/ / 2009年先进光学技术及其应用研讨会论文集 (上册).杭州:[s.n.],2009.
, [0 C% F6 U; W+ n$ P5 c- C& C& I [10] 李旭,孙永康.地面三维激光扫描技术在工程测量中的应用[J].城市地理,2018(2X):79-80.
W) l# }; w9 D2 h! _( x: w [11] 马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
c; K: b5 s# t$ t- s7 ] [12] 张启福. 地面三维激光扫描仪性能测试方法研究 [D].郑州:信息工程大学,2012.
. `; c' \& Z4 ?' k& p( Q [13] 张小越,王羽.基于三维激光扫描技术的建筑信息采集方法研究[J].北京测绘,2017(S1):130-133.
9 I5 w T1 E! l1 H, p% Z [14] 周超,李慧.三维激光扫描技术在工程测量中的应用 [J].工程技术研究,2020,5(18):123-124. 6 ~" S3 r# S0 p1 B. E; q+ A& m! u7 C
(责任编辑:胡淼)返回搜狐,查看更多
' J/ y( E o0 ?' q
* O% Y! o+ m# W# Q0 S# E 责任编辑:
# G0 s% L8 Y. k1 o! c; O* ~
8 w1 P1 `1 e" Y' X9 y d
- O% o% x, h1 Q+ Y0 e- l
7 S5 q6 Q: }9 R7 ?& Y& T* f* ] @9 _5 k. m! B
| 

















