 点击上方“溪流之海洋人生”即可订阅哦 点击上方“溪流之海洋人生”即可订阅哦海洋占地球表面积的71%,是地球上最大的自然地理单元,拥有地球上最多的生物种类和丰富的自然资源。而深度超过1000m的深海区域蕴藏着丰富的油气、矿产、生物和深海水等资源,是地球上尚未被人类充分认识和开发利用的战略性资源基地,也是人类未来大规模开发的最广阔地区。
# p+ `0 \2 p8 ]$ J X- Y: I) O 由于人类难以在海洋环境条件下生存,因此对海洋的探索和开发离不开各种海洋装备。深海机器人是一类重要的海洋装备,通过搭载的各种电子、机械设备,能够快速、准确地巡游于深海环境,进行深海资源勘探、科学考察、矿产开发以及完成某些特殊任务。深海机器人的技术水平一定程度上标志着一个国家海洋资源勘探、开发的科技水平和海洋权益维护的能力。 " C0 t) l% q$ z
近年来,世界各国针对深海机器人技术进行了广泛研究,已研制出多种类型的深海机器人。其中自主式水下机器人(AUV)和遥控水下机器人(ROV)是研究较多的深海机器人。在深海AUV方面,国外著名的有美国麻省理工学院开发的Odyssey系列、加拿大ISE公司研发的ExplorerAUV等,国内也有中国科学院沈阳自动化研究所联合哈尔滨工程大学等单位研制的CR-01及其改进型CR-02,以及后来自主研制的“潜龙一号”和“潜龙二号”,如图1所示。  , w! i/ _. K2 [6 j* C5 ` , w! i/ _. K2 [6 j* C5 `
(a)Odyssey  % q: P( @9 d2 i+ w- [ } % q: P( @9 d2 i+ w- [ }
(c)CR-01  " K/ t7 ]. P' G* U( M8 b' j0 S4 x
" K/ t7 ]. P' G* U( M8 b' j0 S4 x (b)Explorer AUV  4 t# C/ [" L# o: C9 s! @ P: p 4 t# C/ [" L# o: C9 s! @ P: p
(d)潜龙二号
6 ~7 ]6 Y* a0 b. J B# G& X 图1 国内外著名的AUV + {# o( _ Y% {
在深海ROV方面,国外著名的有美国伍兹霍尔海洋研究所研制的Jason号、日本海洋科学技术中心研制的KAIKO7000号等,国内上海交通大学也先后研制出了“海龙”号和“海马”号ROV,如图2所示。对比AUV与ROV可知,AUV无需电缆遥控,活动范围大,探测能力强,但悬停定位、稳定作业能力不足,而ROV依靠多个不同方向的推进器提供稳定推力,可精确移动定位和作业,但活动范围受拖缆的限制。AUV和ROV往往设计为零浮力,因而在复杂的海底作业时会受到比较大的限制,而爬行机器人在这方面则有着先天优势。  ; k8 j u0 g4 D8 q
; k8 j u0 g4 D8 q (a)Jason  ! k9 B5 P+ f8 a p- t ! k9 B5 P+ f8 a p- t
(c)“海龙”号  9 m6 H, u3 W% K+ d# n: y
9 m6 H, u3 W% K+ d# n: y (b)KAIKO 7000  3 T0 M& ^% C+ ^% D6 d
3 T0 M& ^% C+ ^% D6 d (d)“海马”号
( b B5 w! Z' z- G1 m( \" E 图2 国内外著名的ROV
: l' W$ P; r; j: S 近年来,随着陆上多足机器人的发展,国外也开始了水下多足机器人的研究。如美国宾西法尼亚大学研制的Rhex、加拿大麦吉尔大学研制的AQUA、韩国海洋系统研究工程部2015年研制的缆控水下多足仿生机器人CR200(图3)以及目前正在研制的深海版CR6000等。水下多足机器人可以像龙虾和螃蟹一样在海底爬行。研究表明,爬行机器人具有地形适应性好、海底作业稳定等优点,但同时也显露出其能源利用效率低、机动能力弱等不足。 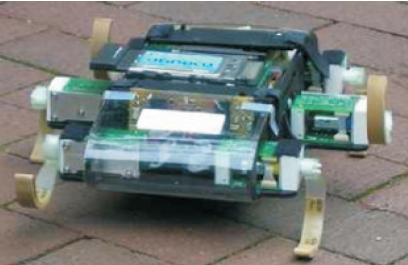  $ T4 Z/ w! }5 ~/ p8 } $ T4 Z/ w! }5 ~/ p8 }
(a)Rhex (b)AQUA  7 B' E* W3 {4 [7 e
7 B' E* W3 {4 [7 e (c)CR200
/ h, I3 Q, N" w ^% E 图3 国外水下多足机器人
H c* t" r8 Q0 O& i) F 鉴于此,本文提出一种既可在水下巡游,又能在海底爬行的爬游混合型机器人新概念,并对爬游机器人水下运动模式存在的挑战及关键技术进行深入分析,同时对爬游机器人实体样机的研制进展做简要介绍。  * }# W' j( r5 e
* }# W' j( r5 e 一 8 o# }6 \; h6 C2 s' V9 w7 }7 e0 ~
爬游机器人概念及特点 9 P% P! m& z( r8 E5 l! Y, k
针对深海海底复杂环境下的稳定探测和精确作业等任务需求,深海爬游混合型机器人既可通过多肢多关节结构实现海底复杂地形中的精确移动和洋流干扰下的稳定坐底,也可利用导管螺旋桨推动爬游机器人进行快速远距离的水下巡游。
+ A9 ~& B% \' m9 j E, ^ 通过合理规划爬行和游动的组合轨迹与控制,实现有限能源的最优利用。兼具AUV高效大范围的机动能力与ROV的精确移动定位能力,还可在复杂的海底地形和洋流扰动下,进行稳定的海底作业。此外,在海底采用足式移动,相对轮式、履带式及螺旋桨对海底沉积物扰动小,可为所携带的探测传感设备提供更好的探测条件,便于对海底作业目标的探测和识别。
3 b! q' V& W# H 爬游机器人采用模块结构,主要包括4个组成部分: 0 n3 N D8 q7 W8 n& _
⑴平台与动力系统, , i' @+ [( d8 }/ c7 h% m
包含主控制舱、抛载控制舱、本体框架、主电源、浮力材料、主推进器和垂直推进器。 $ d" T, M' o% e& [1 v: V* S1 h: e/ d
⑵机械腿系统,
7 J/ t( ]+ u3 _2 b: ] 包含前腿、中腿、后腿、机械手和足力传感器。其中,前腿可兼作机械手。 * X7 B$ N+ d8 l4 v/ {3 ^3 C6 T
⑶导航与控制系统,
& w) K" F; g+ \0 X G2 Y* V" Q; V9 P 包含控制电子舱、导航计算机、运动控制计算机、惯性导航系统、超短基线定位和水声通信系统、频闪灯、高度计、深度计、水下照明、水下相机及避碰声呐。 $ }# c$ B$ X8 T) |( p, _2 b; r* F
⑷安全抛载系统。 % \( e( m: ^7 _* @+ F b
其总体方案如图4所示。主体结构采用框架式,6条多关节机械腿对称布置于框架下方两侧,1对导管桨推进器水平安装在框架后部。框架中部布置有容纳各类控制器件的控制电子舱,高能量密度主电源、潜浮与应急抛载系统等机构及模块位于耐压舱下面的框架结构下部。框架上不采用浮力材料填充包覆,本体部分采用非回转体流线外形,以使爬游机器人获得较好的水动力性能及站立抗扰流性能。  ( \5 ~& F3 _3 k% I& a2 U$ b
( \5 ~& F3 _3 k% I& a2 U$ b 图4 爬游机器人总体方案图 0 e5 |0 ~# c$ h' e- X/ b
针对深海科学考察、环境监测、工程实施、应急搜救等需求,在进行深海爬游机器人关键技术研究的同时,同步开展实体工程样机研制工作,并通过海试对爬游机器人的相关性能进行验证。该爬游机器人的主要技术指标见表1。
1 }. Z# d4 _% I- R1 H 表1 爬游机器人主要技术指标  . N) b }% B+ @. S
. N) b }% B+ @. S 二 4 I4 e R' h8 v/ M
关键技术分析
) L4 I2 m: ?/ n: A- Q! _ 爬游机器人不是在现有多足机器人的基础上简单地加个螺旋桨就可以实现的。首先,爬、游混合将带来更加丰富的运动模式,爬游机器人独有的多模式平稳切换对于实现其水下功能至关重要;其次,爬游机器人为无缆自主机器人,所携带的能源有限,需要优化不同运动模式的能源消耗以实现更好的任务完成能力;最后,爬游机器人的应用环境在深海,设备器件都需要承受高水压,尤其是机械腿电动关节往复摆动密封不同于常规螺旋桨动密封。这些独特的应用特点将带来一系列不同于传统水下机器人的新的关键技术问题。 0 n7 d- T0 i) E
通过总结分析可以发现,爬游机器人需要解决的关键技术问题除了通常AUV中需要解决的水动力性能、耐压结构以及爬行机器人要解决的行走步态等关键技术外,还需解决适应其应用特点的特殊问题,包括爬游切换时的稳定控制、洋流扰动下如何稳定、多运动模式如何规划调节才能有效利用能量、运动关节的高压密封,以及新型爬游机器人总体集成与优化等。
. X5 R+ ~* d) F4 W+ n ⒈运动姿态调节
, N7 [8 K. t9 L5 B& S3 O% g 爬游机器人不同于传统爬行机器人的重要方面是其兼具有海底爬行和水中游动功能,这也使其拥有了更多的运动模式,在水下主要包括下潜、巡游、落底、坐底、爬行、作业、起底、上浮等8种方式。而由本体和机械腿构成的爬游机器人腿部重量较大,可通过调整腿部关节的角度来调节机器人整体的重心高度。多种稳定调节的手段以及更加丰富的运动模式,使得爬游机器人的运动姿态调节对于爬游机器人水下运行的安全稳定具有重要意义。
% Z" \# b7 ^2 k, P 爬游机器人在爬行/游动混合运动模式中,其姿态、航速变化幅度较大,存在多种非线性不确定性,多足与推进器作用效能时变,系统的稳定裕度较低,极易失稳。因此,既需要综合考虑爬游机器人运动状态的可达性和状态切换的平稳性,又需要具备在复杂海流及多种非线性不确定性干扰情况下的鲁棒控制能力。需针对爬游机器人爬行模式与游动模式之间的切换,设计爬游混合运动控制算法。规划模式转化过程中躯体的姿态变化轨迹、多肢关节的路径以及推进器的控制策略,在足力、关节转角偏转的驱动下,引导爬游机器人姿态由爬行姿态逐渐跃起,在推进器的动力下离地游动,多肢关节在变换到巡游模式时,需要配合机械腿完成姿态的闭环调整,从而实现爬行到游动的混合平滑切换控制。同理,需实现由巡游模式到爬行模式的反向转换。
$ U4 ]" B" a% O3 ?/ M6 t2 ` 针对游动模式与爬行模式切换的落底和起底过程,以爬行平衡状态为起点,巡游状态为终点,以状态和能量变化最小为目标函数,连续求解模式转换过程中的躯体和关节的平衡点状态,形成模式转换路径,即一系列连续变化的航速、姿态、多肢关节偏转构成的平衡点;以转换路径作为参考指令,不同平衡点根据运动过程中各腿部关节以及推进器对于姿态的作用效能,根据逆动力学求解姿态平衡所需的力和力矩,然后按照比例分配给相应执行机构,并采用模糊推理根据当前的航速及姿态对连续运动过程进行综合推理分析,从而实现多模式爬行/游动平滑切换的混合运动控制。落底/起底控制逻辑图如图5所示。  0 o+ I* P. o% u' x, A q9 s( L/ S
0 o+ I* P. o% u' x, A q9 s( L/ S 图5 落底/起底控制逻辑图
9 K. B; U% }# Y ⒉多肢多关节协同抗扰流
" ^- s/ j2 a7 g. p; p- k- L5 E. Z 由于海水的密度约为空气密度的800倍,使得爬游机器人在水底移动及遭遇扰流时的水阻力远高于陆上机器人移动受到的空气阻力,这也是水下机器人与陆上机器人的另一显著差别,在分析水下机器人的受力时必须要考虑流动阻力的影响。在爬游机器人水下坐底、爬行和作业时,可能受到来自不同方向的具有一定流速的暗流的扰动,对爬游机器人的沉底作业稳定性造成了很大的影响。爬游机器人特有的多肢多关节结构使其可通过机械关节角度的调节来实现本体姿态的调整,从而改变受到来流时的升力阻力分配,提高其在扰流中的稳定性。 t6 ~# X& O# T9 s
根据爬游机器人总体方案,结合设计指标要求,开展了爬游机器人本体水动力建模与抗洋流稳定性研究。通过CFD数值计算手段,对不同本体倾角条件下的爬游机器人本体受水动力情况进行了仿真分析(图6),获得了不同倾角时本体升力、阻力的变化情况。  ( K( _9 T4 t; q: r" R5 u ( K( _9 T4 t; q: r" R5 u
图6 爬游机器人本体不同姿态下的水动力分析 ( T& F2 {2 ]# o4 w' i9 c" A( z$ e
由图6可知,在相同来流速度情况下,本体倾角的变化对受力有显著影响。在此基础上考虑地面边界效应以及支撑足的影响,建立了附加6条足的地面站立爬行机器人流场仿真模型(图7),并对不同来流以及不同本体倾角条件下的水动力性能进行数值模拟,结合动态稳定裕度法对爬游机器人的稳定性进行计算,得到了不同洋流条件下本体的安全活动阈值(图8),下一步将据此构建洋流条件下的爬游机器人安全运行策略。  ?* `- Y% @6 K1 K1 Z) V6 }1 `4 e7 g
?* `- Y% @6 K1 K1 Z) V6 }1 `4 e7 g 图7 爬游机器人在洋流中底部站立流线图  : v/ e% y7 Z4 H' e7 z. K k; y : v/ e% y7 Z4 H' e7 z. K k; y
图8 爬游机器人不同安全活动阈值图
) V9 M# d" A* W5 N0 V4 B/ G/ } ⒊低能耗运动规划
& G: Y. a# j* A# W 作为自主运行的爬游机器人,其所携带的能源总量有限,所携带能源的利用效率直接决定了爬游机器人水下的作业时间和作业范围。爬行具有精确移动的优势,但能量消耗较高,而游动时的能源利用效率较高,这就使得低能耗运动规划成为爬游机器人需要解决的一个关键问题。需要对不同海底环境、不同任务开展运动方式的规划,并与优化问题同时展开分析,对深海爬游机器人的路径规划、运动规划、爬行/游动模态的控制算法开展研究,构造最低能耗规划控制算法,提高爬游机器人的运动能耗性能。
' o+ h* m# l8 {3 C: o. K 低能耗运动规划研究分为局部能耗优化和全局能耗优化2种。局部优化指爬行、游动等模态下的能量损耗最优,全局优化指基于深海复杂地貌环境探测与能耗评估,进行路径、运动规划,实现能量最优分配。 * Y8 v" g- u/ Y3 d* b4 g/ P
针对局部能耗优化,需对关节电机和推进器电机的能耗进行分析。对足端脚力约束和关键力矩约束进行分析,对爬行、游动、爬/游混合姿态控制结构中的步态分配、多足脚力控制的参数进行调整,使其在满足控制性能指标及稳定裕度的基础上,降低爬行、巡游、爬游混合等不同运动模式下的能源消耗。 # K9 [+ T' A# P
对于全局能耗优化,需要建立复杂地貌因素、运动模式与能量消耗之间的模式分类函数,对不同因素的能量损耗进行量化分析,结合系统的约束条件,在保证爬游机器人的任务可达的基础上,规划出一条爬游机器人从当前起点到目标任务点的航行线路。通过对周围环境中的地形和干扰因素进行整体分析,结合自身的能耗特性,并根据爬游机器人具体的作业任务进行全局路径规划。当爬游机器人需要进行大范围运动时,采用巡游的方式;当需要进行精确作业时,则采用爬行的方式;当需要抵抗海流扰动时,爬游机器人通过爬行并调整姿态来实现。爬游机器人在水下作业时的全局路径规划如图9所示。其在运动和作业的过程中始终以能耗和作业任务为优化目标,对运动方式和路径进行规划,确保在航行过程中处于耗能最小的状态。  fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E) ' J( C2 q. W/ E: c" v! {* o
' J( C2 q. W/ E: c" v! {* o 图9 基于全局能耗优化的路径规划示意图 + C. ~/ q0 O9 x
⒋运动关节高压密封 * _5 U% r( N' Y; S
作为深海爬游机器人,为保证其在深海水下的可靠运行,高压密封是必须解决的关键问题。不同于传统螺旋桨驱动的AUV和ROV的动密封形式,爬游机器人多肢多关节的结构是由多个在一定角度内往复摆动的电动关节组成,其水下爬游姿态的调整需要通过多肢多关节机械臂/腿协同运动来实现,关节的水密可靠是爬游机器人正常工作的基础。
( e5 H% }. D% i' v& D2 A l 图10 深海关节动密封测试实验 : y: N2 g1 y+ e( N' F
关节往复摆动的动密封既要保证关节电机、驱动器、编码器等器件在水下高压下的正常工作,也要尽可能减小动密封带来的电机效率损失。此外,为了保证机械腿的运动良好,关节设计应尺寸紧凑。因此,关节设计为带有压力补偿型的结构,电机和速度(位置)传感器都在浸油环境中运行,并为驱动器等不能承压器件设计专用耐压结构,通过静密封结构与电机分隔开,电机出轴端采用多种动密封的组合密封方式。图10所示为研制的关节样件,以及在高压釜中完成的连续运行耐压测试。测试结果表明,电机在各种工况下运转正常,密封良好。 j% e7 V; }7 ]+ n: x" r. C+ ^
⒌总体集成与优化 ( R9 @. T+ ^* [" s
爬游机器人的设计涉及多种专业,需要综合运用水动力、结构、机械、电气、通信、控制等多方面的知识才能完成设计。此外,设计问题相互耦合,各性能参数之间相互制约,使得某一设计参数的改变影响多个参数的变化。 . X, D! L' W; n0 t: ? a
爬游机器人是全新的无人潜水器,从水动力外形、总体布局到系统配置没有母型可以参照。而多肢多关节的结构特点使浮力与重量的平衡更加困难,爬、游混合的水下运动方式增加了爬游机器人运动控制的复杂度;此外,爬游机器人还需要具备较强的抗扰流能力,并兼顾爬行及游动的稳定、机动以及低阻力等约束。需要通过总体集成以及多学科综合优化技术,实现系统与设备的优化布局、智能控制策略与运动方式的协调匹配。 ; x: ~' A& v* L4 h0 z9 K2 O
爬游机器人在综合考虑爬行、游动功能及下潜安全性的基础上,处理并分配所有功能和设备布局的优化问题,以功能模块化和结构分块化的准则对爬游机器人平台进行总体布局设计,确保所有的部件满足设计要求,使爬游机器人具有良好的可靠性和扩展性。形成了主要由本体与机械腿两部分组成的总体布局,其中本体外线形光顺,上部稍宽,下部收窄,横切面呈倒三角形,俯视图为近似椭圆形,爬游机器人外形设计方案如图11所示。这种本体设计方案可将重量较重的电池、抛载以及机械腿等装置放置于下部,将浮力材料布置于上部,提高爬游机器人稳心高度,有利于提高水下静稳定性;同时,较窄的底部结构可使腿部获得较大的活动空间,且较窄的底部宽度有利于减小腿部关节力矩及功率要求,从而减轻腿部重量,以及用于平衡重量的浮力材料重量。 ! B+ q* Y1 ^8 b+ b& F8 l9 \- @+ f: H
图11 爬游机器人初步设计方案
& t( n/ D" D* U W8 I3 V 三
1 C( b0 }( ~; z- P) i 结论 ( E5 l$ m7 W$ ?. G( [
本文提出了一种新型自治水下爬游机器人概念,并对爬游机器人的模块组成、功能和性能指标进行了介绍。由于使用环境和运行方式的特点,爬游机器人具有不同于传统水下机器人的特有的关键技术问题,本文对关键技术的解决途径进行了深入分析,并对各关键技术的研究进展进行了介绍。后续将开展工程样机的研制工作,还需要解决的问题主要有:⑴爬游机器人多运动模式切换控制算法的调试与功能验证;⑵爬游机器人水下爬行及游动稳定性水动力试验;⑶关节动密封带来的电机效率损失及长期运行可靠性;⑷水下目标识别与作业导引技术;⑸工程样机耐压结构设计试验与总体重量控制;⑹总体可靠性及抛载系统试验验证。
U, `3 F+ y; A! o% d 1 3 e' A3 F" [+ K( d
END
* c, P D4 B1 A- B 1
- f' M8 R+ t# B/ {( L+ s 【作者简介】文/陈虹 王心亮 魏伟 刘智 马哲松 郑超 唐平鹏,均来自武汉第二船舶设计研究所。第一作者陈虹,男,1973年生,博士,研究员,研究方向为控制理论与控制工程。本文为基金项目,国家重点研发计划资助项目(2016YFC0301700)。文章来自《中国舰船研究》(2018年第6期),参考文献略,用于学习与交流,版权归作者及出版社共同拥有,转载也请备注由“溪流之海洋人生”微信公众平台编辑整理。
2 D3 e6 w9 t) p# m9 E' s* f! z( X 相关阅读推荐 科技动态▏深海小型爬行机器人研究现状海洋技术▏深海作业型机器人总体设计及性能分析海洋技术▏水下机器人坐管作业机构设计与分析产业报告▏国内水下机器人产业最全解读海洋论坛▏“海龙Ⅲ”号ROV系统深海试验与应用研究海洋技术▏孙玉山等:智能水下机器人路径规划方法综述
" Q8 K* r# y9 E/ m2 |8 U1 c% J; N 公众号
% D# g/ n% g# z) l 溪流之海洋人生 7 T1 A0 t ~& }& u7 C8 a g2 Q
微信号▏xiliu92899
1 i: g5 f! v; L9 U/ h- M 用专业精神创造价值
, k# R- h) N; d$ | p% T 用人文关怀引发共鸣 您的关注就是我们前行的动力
: K7 S% C7 [! ~+ _, E9 j 投稿邮箱▏12163440@qq.com
8 t' w8 I* L J4 K9 n1 H& z9 b" Y5 z' s; \, V: h* t
8 Z2 J! U0 M" o/ m' G& ]) t U' I8 X3 m0 i6 ^7 [) q) u
% h2 M' v5 N5 M" N" Y3 I
| 

