|
/ j& k5 I5 p/ @+ |4 P! e 从海蜇到章鱼,海葵到海参,海底下充满了柔软的无脊椎动物。
& z! I6 f8 d c' Z- E 虽然这些动物靠着柔软的身体完美地适应了深海压力的伤害,也因此吸引了科学家的目光。科学家想知道怎样才能在捕获这些软体动物的同时不伤害到他们柔软的组织呢? 7 S1 B5 n1 t! c0 Z2 A' _( X9 q
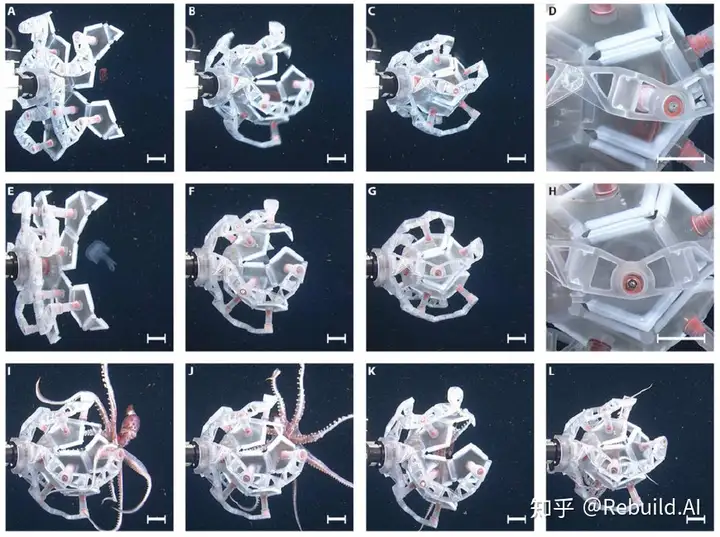
哈佛大学威斯学院的科学家最近从日本折纸中获取到了灵感。受传统折纸技术的启发,工程师和海洋生物学家设计了一个犹如折纸一般3D打印的12面体捕获装置,可以轻松地把毫无防备的海洋生物包围起来。
' F6 Y5 A( E- @# q; L' f) t3 Q+ ?& V
+ U+ g! m4 f7 [8 ~: l1 X 水深563米捕捉乌贼
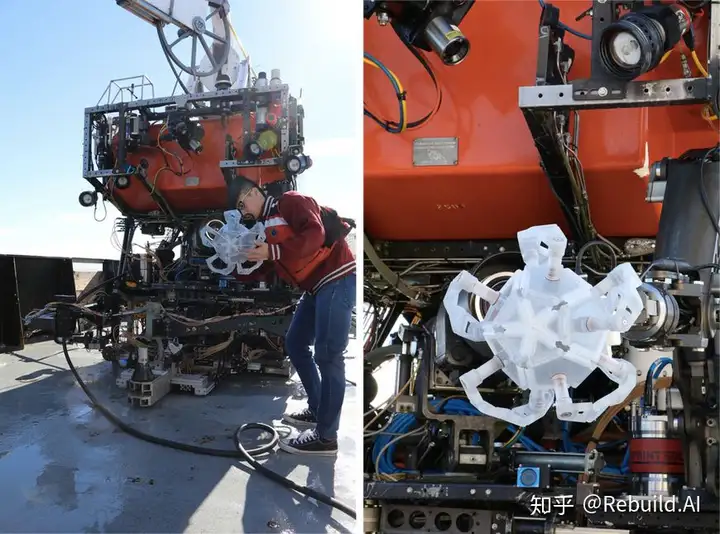
* M: z7 V$ l- S 这个可以轻松达到旋转、展开、折叠功能的十二面体可以连接到水下漫游车的仪器臂上并远程触发以安全地捕获软海洋生物。
& n7 F4 E6 r3 @1 g. ^( w4 ^/ q 这个装置已经成功通过测试,捕获海洋中700米深处的小鱿鱼,章鱼和水母。而且这个装置的设计足够坚固,能够在长达11公里的深度工作,并且可以轻松扩展以瞄准更大的生物。 1 L: i" T3 a4 _( w* L3 A# `! X& P
因为很“温柔”,所以可以在海洋生物的研究中保护无脊椎动物
5 {# w8 S) y1 ~# G. @# y k1 f 看到这里各位吃货可能都咽了咽口水,不过可能要让大家失望了,这项技术当然不是为了捕获深海海鲜而发明的。海洋生物学家David Gruber解释说,这项新技术对未来探索海洋生物有很大的帮助。 3 w+ a- |' j/ m
8 X. `1 K5 t; J' T4 n 图为David Gruber 0 r1 u( O C1 C( ]( D
事实上,从20世纪20年代开始,对海洋生物的研究通常依赖于捕捞鱼类和甲壳类等比较“结实”的物种的网。 然而,他们在捕获的时候,通常不管什么海洋生物都不加分类的暴力捕捞上来,结果无脊椎动物的身体结构被这些坚硬的捕捞网破坏。后来采用的诸如抽吸式采样器(它实际上是从远程漫游车上扫描样品)这样的新设备可以针对特定的生物体,但它们仍然可以破坏脆弱的生命形态。 ) F8 y# r% D4 h5 T0 E3 x1 `( G) M
由于捕获技术跟不上、无脊椎动物捕获难度大,所以对水母,栉水母和被囊类动物等软体生物的研究已被科学家“忽视”。由于这个原因,他们甚至被称为“被遗忘的动物群”。 . R& \: U/ P V8 p0 Y9 }. H+ |
格鲁伯说,在新技术的帮助下,这些“被遗忘的生物”将重新进入科学家的视野,我们将更好地了解他们在海洋生态系统中发挥的重要作用。要知道, 在全球范围内,无脊椎动物构成了超过380亿公斤碳的生物量,这大约占世界总生物量的7%,或超过人类总生物量的100倍。 4 r2 O ]/ R# S6 i
复杂的设计 为了更好地保护海洋生物# p Q$ m4 H, n" g: |0 W
然而,设计RAD并不容易,因为该设备充满了小而重要的连接口。例如,在十二面体的面板之间留有间隙,以便当海洋漫游车从海底到达地面的过程中,防止压力在内部积聚。这些面板的边缘也比主体的耐用塑料更柔软。而这样设计的原因竟然是避免意外夹伤被捕后奋力逃走的海洋生物。 & l3 R F: \4 ]4 m
( `. H+ [5 o1 ]! S: e" V$ O; ]5 A, J 据来自哈佛的机械工程师Zhi Ern Teoh介绍,设计这个装置最关键的挑战是需要只用一台电机来驱动整个折纸装置。这样做意味着整个系统不能出现太多故障,并且只要使用单个命令就能对所有面板执行折叠和展开的动作。
. p: [ J! j2 i% |$ k 这就意味着Teoh和他的同事必须设计一系列复杂的连接,确保设备的12个面板都能连接到中央电机。同时这些面板必须足够轻且足够坚固,这样才不会使电机过载或者在执行任务中出现连接中断的问题。
3 c+ |; r8 |4 ?& G) r% S, u, w) C 当然了,这种“折纸”设备也不是唯一用于捕捉软体海洋生物的方法。其他科学家已经尝试过用鱿鱼形的机器人手捕捉珊瑚,这种方法屡试不爽。 但Teoh和Gruber说,这种新设计的一大优势在于这个设计能够不断改进。
" D( ^* P8 f! e' j! h! Q$ o5 S -End-
6 W( c* F1 `( j0 a! T 编辑:Zhilin
6 G* ]( ~3 S: m( M( P; _4 I. i 本文章图片来源于网络 ( ?8 d2 i& Z# P
想要了解更多人工智能领域的资讯、行业动态,欢迎关注声学在线公众号! I3 N1 h8 }2 m- X* D. u
3 L* h! X( { N/ M7 m2 D2 b' h! t0 c/ V# E4 Q9 d/ |
! s8 E7 A {) \8 N9 X; V
7 a0 I. C- X( F. ` `2 |* u
|