深水网箱网衣材料多为聚乙烯或尼龙,这些网衣材料本身无毒并且具有比表面积大等特点,由于其长时间浸泡在海水中,污损生物容易在网衣上繁衍滋生,主要为贻贝、海鞘、藤壶、水螅和藻类等。目前,清除网箱污损生物的成本较高,可达养殖成本的5%~10%。网箱网衣的防附着已经成为海水网箱养殖业亟待解决的一大难题,也是设施养殖的重要研究方向。
" k( [6 e5 X4 T6 k r
3 P7 j3 J3 D1 {+ D( j8 [( s8 L1 Q9 D/ \" `4 X _ b8 O
移动式水下网箱清洗装置
/ a2 L1 f+ E7 |9 I# L
3 U: c- y! X) I1 ]2 L0 `
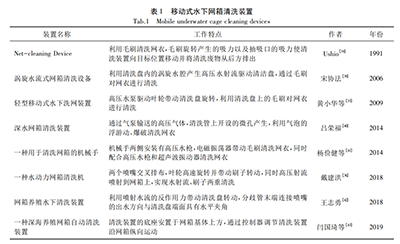
7 M' w% i3 {2 e# H/ k' P2 i/ W1 r ]高压水射流与物理摩擦能有效去除不同种类的附着物。早期设计的清洗装置多以便于人工操作的轻型移动式网箱清洗装置为主。这种类型的装置通常由1台独立驱动的发动机提供动力,由工作人员手持连接清洗头的操纵杆对网箱进行清洗。8 R# V7 P. v: z9 [' N+ ^: D5 d: J- C
[宋协法]等设计了通过高压水泵产生高压水流,高压水流产生的反作用力驱动圆盘及毛刷旋转以对网衣进行清洗。[黄小华]等利用喷嘴产生的高压水射流驱动叶轮旋转进而带动清洗盘转动来实现对网衣的清洗。[戴建洪]通过交叉排布的2个喷嘴驱动叶轮高速旋转并带动毛刷转动,同时利用高压水射流压力和毛刷,实现对网箱的双重清洗。这种类型的移动式网箱清洗装置结构简单、操作方便,工作人员手持操纵杆即可实现对网衣的移动式清洗,有效清除网衣上的污垢和污损生物,极大地减轻工人的劳动强度,提高了清洗效率,但在设备的可操作性及自动化方面还有待于进一步提高。日本的富士公司为了减轻渔网清洗作业的劳动强度,研制了鼓轮式自动渔网清洗机,利用鼓轮转动时产生的离心力使附着在网衣上的贝壳和海藻脱离。常见移动式水下清洗装置如表1所示。4 y4 R$ R$ J0 f3 e9 O: d( F
& @6 d% c4 c: O潮流动力型网箱清洗装置* u% k( V6 B* z) R& s/ _
4 d+ \% j2 q. B* s0 l1 Y& Q9 B! o6 X F$ g3 y' X1 u, z
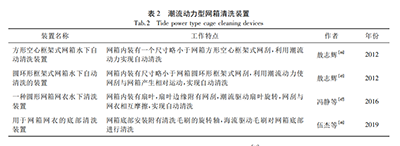
潮流动力型网箱清洗装置是利用潮汐和波浪的作用,使网衣与毛刷产生相对运动,达到自动清洗的效果。此类装置合理利用大自然的能量,既不需要养殖船,也不需要人工操作,降低了人工成本,但该类清洗装置固定安装复杂,且容易对网箱造成伤害。例如:[敖志辉]在环形网箱内加装一个尺寸略小于网箱的圆环形框架式网刮,在潮流的作用下,网刮相对网箱产生上下起伏和前后左右的运动,并在潮流冲击下自动靠紧网箱,实现对网箱的自动清洗。[冯静]等发明的网衣清洗装置则是利用潮流的作用带动扇叶旋转,使扇叶边缘的网刮与网衣相互摩擦,达到自动清洗网衣的目的。[伍杰]等设计了一种用于网箱网衣的底部清洗装置,在网箱底部设置一个附有清洗毛刷的旋转轴,在海流的作用下,毛刷不停地对网箱底部的网衣进行清洗。- ?0 P: r! u& P" r7 ~
常见潮流动力型网箱清洗装置如表2所示。 V8 h' I0 I- p, ^+ R) G
* I1 f7 C$ S" B% \: _+ J' p轨道式网箱清洗装置
5 n, L) D" `( |* U- @' q2 `4 U( a" k4 n4 I3 j9 a
" _2 `. l/ J$ x2 Q/ u m6 V8 s
网衣属柔性结构,必须保持毛刷与网衣的良好接触或喷嘴与网衣之间适宜的距离,才能达到良好的清洗效果。通过水射流对网衣进行清洗,射流产生的冲击力会使清洗盘远离网衣,降低清洗效率。轨道式网箱清洗装置可使清洗装置沿轨道行走,保证清洗装置与网衣的有效清洗距离,提高清洗效率。[Andersen]在网箱外侧和清洗单元上均安装有磁吸式框架,清洗单元可沿着框架轨道滑动,利用高压水射流和毛刷对网衣进行清洗。[薛洋洋]等在轨道上设置了清洗程序,清洗单元根据程序沿框架轨道移动清洗网箱。张祖禹设计的轨道安装在网箱内部,清洗单元沿网箱内壁移动,可将污损生物直接排出网箱。4 c! T; Z, {- k; t! S
水下清洗机器人
0 @* ]% O/ w5 v3 I$ h' L j* a5 g! @4 ]4 h" @( a! q3 q" \- D
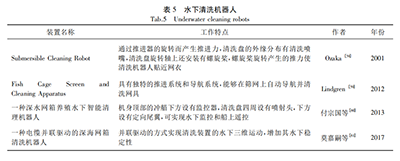
2 L/ @. E0 t5 P- E水下清洗机器人具有操作简单,安全可靠,自动化程度高等优点。其主要由控制系统、运动模块和清洗单元等构成。水下清洗机器人的控制系统可以根据不同的污损生物类型来设置和调节,如清洗的速度和时间等。通过水下摄像机向操作人员反馈网衣附着及清洗效果。例如:[Baba]发明的网箱清洗机器人,由清洗单元、运动装置、水下摄像和照明装置等组成。该机器人可通过反馈及时调整潜浮姿态和螺旋推进,可改变机器人清洗轨迹和运行方向,利用高压水射流技术对网衣进行清洗。[刘冠灵]等设计的履带式水下清洗机器人,利用高压旋转水射流技术,将高压水通过清洗盘分配至歧管,实现高压旋转式射流清洗,同时,利用反向喷射水流的反作用力,使整个机器人紧靠网衣表面。[Lindgren]将导航系统应用到水下清洗机器人上,使其能够在网衣上沿设定轨迹移动。此外,该设备还应用了螺旋桨反转技术,便于越过障碍从而实现高效清洗。AKVA公司售卖的清洗机器人FNC8较为常见,搭载了多种传感器原件和摄像系统,每小时可以清洗网箱网衣5000m2,工作环境最深可达100m,日本洋马公司推出的NCL型水下清洗机器人技术参数如表4所示。
2 A9 y2 B0 r5 }3 k1 g1 |$ _
/ x# v7 k5 n6 r; X常见水下网箱清洗机器人见表5。2 A) q) S' w# X% ]) H \" v
4 J$ H4 x H, @$ X! ?来源 | 本文节选自《渔业现代化》刊登的《深水网箱清洗技术及装备研究进展》( U8 K7 f+ h: H* N. _# S! y* u
作者 | 宋协法,孙 跃,何 佳,褚云冲,孙佐梁 ( 中国海洋大学水产学院,山东 青岛 266003)4 @0 f4 A3 V7 `% s y
排版 | 数智海洋公众号
3 F% ^# G) k- i, {) u: r& D" y5 P' q
该文章来源网络,如有侵权请联系删除
% J8 T) {0 l" d. M查看原文:www.52ocean.cn |



 , R# q3 X+ d) o6 r
, R# q3 X+ d) o6 r ; l% V* r, O: U9 `
; l% V* r, O: U9 `