 8 c+ I8 u1 b E2 w9 \
8 c+ I8 u1 b E2 w9 \ 装备进展
9 I0 _( F- U# m3 z: K
6 \; [9 q% s& `2 V Progress of Equipment  * U" t& j- o* }9 q) y" S R6 r" g * U" t& j- o* }9 q) y" S R6 r" g
文章导读 % _0 P& f; I9 o! S# Q/ a5 ^
现代海洋技术正在不断进步,目前市场上充满着适合各种深度、海洋条件和应用场景的航行器,能够针对不同用户的需求提供不同规格的产品和定制产品。本文将简要介绍一些拥有这种尖端技术的顶级公司最近开发的一些产品,分别是德国EvoLogics公司Quadroin AUV、美国HII公司REMUS 620、挪威康斯伯格探索公司(Kongsberg Discovery)增程型HUGIN UUV——HUGIN Edurance、Greensea IQ公司EverClean海洋机器人、“蓝鳍金枪鱼”(Bluefin)公司Bluefin-21 UUV、Exail公司DriX USV、SEAMOR公司和Voyis公司Mako ROV、Seatools公司Fall Pipe ROV——Yellowstone PLC、QYSea Technology公司FIFISH E-GO观测机器人以及Teledyne Marine公司“鱼鹰”(Osprey)AUV。  / ~& A% L' l; d5 c' Y3 s
/ ~& A% L' l; d5 c' Y3 s 01
, T! ]& J g: f! O* l* _: S& h' v9 Q$ m Quadroin AUV
9 w3 e6 a; U" r2 r! | 在AUVs、UUVs和ROVs领域,目前市场上大多数公司都在开发满足不同观测和作业需求,能够收集数据和监测环境的航行器。Quadroin AUV最初是由德国EvoLogics公司与德国亥姆霍兹联合会(Helmholtz Association)于2021年联合开发的一型AUV,用于他们的“地球系统模块化观测解决方案”(Modular Observation Solutions for Earth Systems,MOSES),这种观测系统旨在调查短期事件和长期趋势之间的地球物理相互作用,包括热浪、极端水文、海洋涡流和永久冻土解冻。最新版AUV已经更新了硬件和推进系统。除了用于测量温度、压力、氧气、电导率、荧光海洋和太阳传感器外,Quadroin还携载了一部侧扫声呐、一台水下摄像机和一个DVL单元等传感器载荷。与其他许多观测航行器不同的是,Quadroin利用企鹅形身体的独特流体动力外形设计,最大限度地减少了能量消耗和阻力,通过仿生技术提高了速度,并能根据应用需求单独或组队作业。  ! M/ i0 j8 F" M7 q1 G ! M/ i0 j8 F" M7 q1 G
图1. 处于水面状态的Quadroin AUV (图片来源:SUBMARIS/EVOLOGICS)# k0 {8 K$ D* U1 o3 |+ W7 N
02
) ?/ K4 l1 R% ?) a1 T REMUS 620
) {) g2 A( F! Z. }; d1 f8 H. S 另一型优秀的UUV产品是美国HII公司(亨廷顿英格尔斯工业公司)生产的中型REMUS 620,它的续航力得以提高,可按用户要求定制,并可进行协同作业。REMUS 620电池工作时间长达110 h,航程275海里。该型多功能航行器通过其开放式结构和模块化,可提供快速任务重构能力,也可以部署在各种平台上,包括潜艇、有人和无人艇、舰船和直升机。  1 f2 Y4 D* Y2 q _
1 f2 Y4 D* Y2 q _ 图2. HII的REMUS 620 UUV准备进行水池测试 6 Y: H! D- g$ M }" O/ _7 p5 e( H
(图片来源:HII) ( c* g. }! j& ]( G
借助新的“奥德赛任务管理软件”(Odyssey Mission Management Software),UUV甚至可用于发射和操作其他无人航行器和任务载荷,为用户提供应用和使用方面最高水平的适应性和可变性(adaptability and variability),可用许多载荷以及配备的CTD传感器来定制REMUS 620,共同为大量任务集提供高性能和可靠的远程UUV。
( Y, T/ I" x! k6 l 03 5 T/ c6 d/ _( ?1 R# L
HUGIN Edurance UUV 7 h7 r8 o9 S% M v/ H* H
增程能力已成为许多现代水下航行器的关键能力。增程型HUGIN UUV——HUGIN Edurance具有令人瞩目的续航力。挪威康斯伯格探索公司(Kongsberg Discovery)生产的这种长 11 m、直径 1.2 m的长航时潜水器在尺寸和组成上都突破了极限。它的额定深度为6000 m,专为远程而制造,使用新型耐压锂电池,可在海上工作15天而无需充电。
/ a' _- a4 V; s3 R9 ~
: t! c6 j+ `6 k, Q6 s. \ 这也使岸基发射成为可能,从而减少对母船的需求。改进的鳍板和独特的尾部设计使它在恶劣海洋环境下航行更加稳定。新型自主任务系统提高了行动部署时的态势感知和决策能力,与Kongsberg公司的Sunstone惯导系统(Inertial Navigation System,INS)配合使用,使HUGIN Edurance无需外部资源即可实现高精度水下定位。HUGIN Edurance配备了一系列传感器,包括:宽幅高分辨合成孔径声呐(HISAS 1032 Dual RX)、多波束回声测深仪(EM 2040 MkII)、彩色摄像机、激光剖面仪、磁力计和环境传感器,适用于从海军、科研,甚至资产检查和搜救行动的各种应用,这使它成为当今水下市场上令人印象深刻的新成员,首套产品计划于2024年初交付。  8 q m4 S) T: I# r: J) X0 {' j" ? 8 q m4 S) T: I# r: J) X0 {' j" ?
图3. 首艘HUGIN Endurance正在进行海试 8 I$ |$ m- W$ r* H9 ^' k8 T
(图片来源:KONGSBERG) - h2 b' E& w: s* g" h' A
04 1 F. u8 R% s7 S( T
EverClean海洋机器人 8 I5 K6 B0 o4 }4 Q' u' O
海洋机器人已被开发用于一系列独特和空白领域。Greensea IQ公司开发的EverClean服务机器人是一款独特的水下船体清洁机器人。EverClean服务机器人最近进行了一些实质性改进,包括数据收集和软件能力。EverClean为船东和运营商提供了一种简单、劳动强度低、效费比高的方法来管理船舶的海洋生物污染。随着新型硬件和软件的进步,EverClean可以自主清理船体上50m2的面积,并改进了障碍物探测方法,只有在需要操作人员干预时才会暂停。Greensea IQ公司还增加了EverClean的洗刷面尺寸,并缩短了必要的监督操作时间,使生产率提高了一倍。新改进的推进器具有更高效的功率使用和分配能力,使EverClean服务机器人的响应性和机动性得到了提高,同时延长了其清洁时间,减少了充电次数。 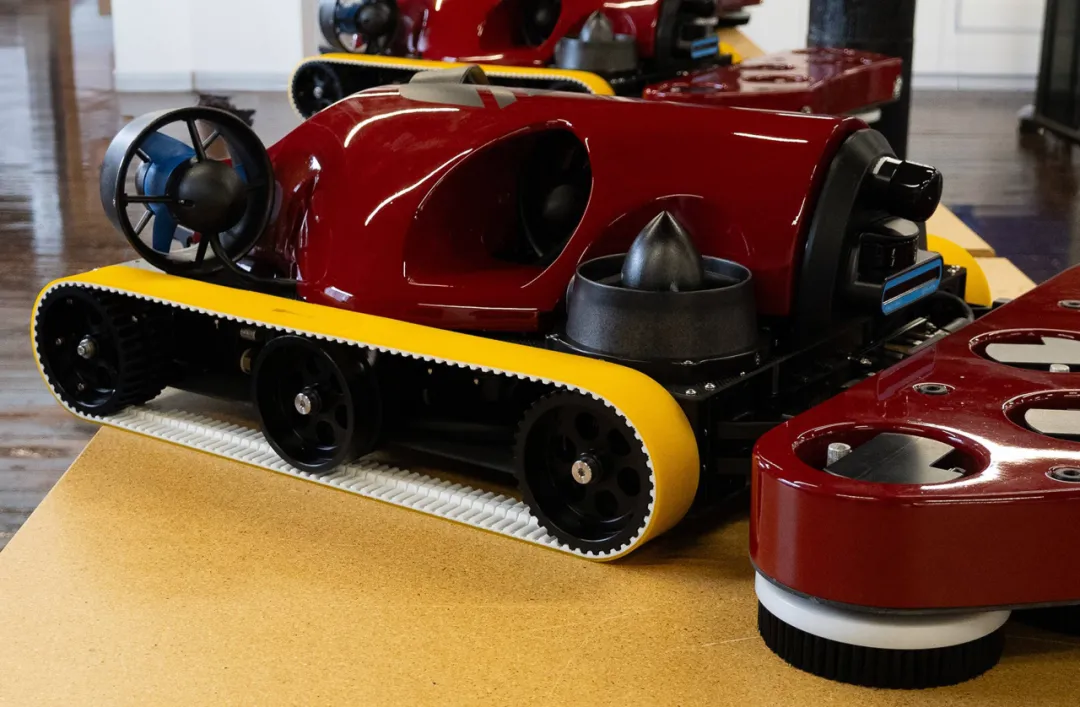  0 d& z f4 Z) f0 D# I 0 d& z f4 Z) f0 D# I
图4. Greensea IQ公司的EverClean服务机器人
9 [) y8 o, o8 p/ Z (图片来源:GREENSEA IQ) ! }+ g2 u' l5 y* j
Greensea IQ 在提升 EverClean服务机器人本身功能的同时,最近还推出了先进的 EverClean IQ 软件,该软件为机器人提供了出色的数据收集和使用功能。EverClean IQ 软件为EverClean服务机器人配备了传感器和摄像头,用于记录清洗刷的压力反馈,并创建非常准确的船壳地图,以提高今后的清洁效率。 / z0 R0 ?* M& `: |9 `( M
05
0 I7 }" m, c6 \# h Bluefin-21 UUV
- w( h2 m* P0 P+ \ 在水下技术市场的增长中,诸如EverClean IQ等软件的进步与机器人和航行器本身一样重要。Oceaneering International公司刚刚发布了相关信息。 ) p6 D2 I& @ `' e
& k8 Q% w) Y: Y
HUGIN Endurance不是唯一可用于军事目的的航行器。全自主Bluefin-21是“蓝鳍金枪鱼”公司(Bluefin)的最新UUV,它具有高度模块化水平,携载先进传感器,适用于科学调查、数据收集和各种军事任务。Bluefin-21能下潜至6000 m深度,它的空间足够大,可容纳先进传感器,包括最先进的合成孔径声呐和水文测量传感器。使用可更换电池并升级充电容量后,Bluefin-21一次充电可工作24 h,重量轻和合理的21英寸口径使其便于运输和部署。   fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E) % F* s5 E3 M8 X/ M/ k; h
% F* s5 E3 M8 X/ M/ k; h 图5. Bluefin-21 UUV 3 @9 G1 |1 Z& M
(图片来源:BLUEFIN)
; Q0 c: B, ]8 R: K Bluefin目前是美国海军“刀鱼”(Knifefish)等军用UUVs的基础平台。航行器的理想应用包括:反水雷、作战环境的情报准备、水文和军事调查、深水搜索和救援、考古和勘探以及未爆弹药处理等任务。 1 T1 ]+ X) g/ `( Z# B; T. a
06
3 J: }0 Z* N% i. V- t% |) j$ U; Z DriX USV
* o! Z+ s3 a- _% M$ q) m 水下市场并非无人航行器在技术上取得引人瞩目进步的唯一领域。DriX是Exail公司的一型自主USV,用途广泛,目前已被美国国家海洋和大气管理局(National Oceanic and Atmospheric Administration,NOAA)及美国非盈利组织海洋勘探信托基金(Ocean Exploration Trust)等机构使用。如图6所示,DriX是一型重量轻但经久耐用的航行器,由复合凯夫拉纤维制成,采用倒置的单体设计和传感器载荷吊舱。 - [- l; C: S: w* S1 o7 ~& y& n
图6. Exail公司的DriX USV
8 s" Q. x6 ?, u3 f0 _, {4 r (图片来源:EXAIL) : E2 _8 s! k3 r4 D, M5 W
DriX被设计用于远程海上监视,可在海上自主工作长达10天,以8 kn常规调查速度航行650 海里,低燃油消耗率为2 L/h。DriX可支持各种载荷,如:侧扫声呐(Side Scan Sonar, SSS)、磁力计和第三方海底测绘设备、导航和定位传感器等;支持各种应用,如:水文调查、渔业资源、生物量评估、海洋感知、近岸施工调查、指挥与控制以及与其他水下航行器通信的数据传输中心(hub)等。
, }( R! i9 ?: _+ R8 b 07 B1 e! T: S, g. |! \: W8 s
Mako ROV
; }, Q4 L' f- Z- v# I9 w$ | 尽管最近海洋观测和作业市场的许多领域已经让位于 AUV、UUV 和 USV 技术,但新型和创新的ROVs仍在发挥作用。SEAMOR公司和Voyis公司合作,将SEAMOR Mako ROV与Voyis的Discovery立体摄像机结合在一起,改变了两者的应用方向和能力,并重新设计了水下检查和勘探任务。
2 l7 P5 a" |/ ^' L/ e6 r 图7. SEAMOR公司的Mako ROV
7 o2 j+ n; O V, N* G+ |9 a: i2 A4 j (图片来源:SEAMOR)
' Y7 G: T h4 q" x 便携式Mako ROV额定深度为600 m,可通过950 m长的脐带电缆进行遥控。它的尺度和构型使其成为管路检查、水产养殖,港口安全监控和各种海洋研究工作的理想选择。同样,Voyis Discovery立体相机是一项广泛适用的技术,可提供高清晰度和高精度的水下环境视觉捕获并即时创建实时3D模型。两者集成为水产养殖管理和水电应用提供了优秀的能力,为Voyis相机出色的视觉捕获能力提供了高效、高效费比和可靠的应用场所。在数据收集、监测的便利性和准确性方面有望得到显著改善的应用包括:例行管网检查、设备回收以及海底调查和采样。
c, ?6 c1 o( a5 P N 08 - A/ N& q* E. S/ s; i5 q
Fall Pipe ROV——Yellowstone PLC
# R3 M. q m2 r+ z2 w Seatools公司新型Fall Pipe ROV——Yellowstone PLC,具有独特、新颖的特点,可提供高精度导航和运动、先进的数据收集和处理以及高效作业和任务执行等能力。与传统的Fall Pipe ROV相比,Yellowstone配有集成推进器,可以克服ROV相对于母船航向的航向偏差,可明显节省动力,并大大提高岩石安装作业能力。该型航行器装备有各类船载测量设备套件,用于优化定位、操作管理能力和环境监测能力,以及使用Seatools公司专门开发的多核处理技术进行调查前后的数据处理能力。
7 F5 K: `) Q% G! u, Q 图8. Seatools公司完成了为DEME集团(欧洲海工巨头)开发的Fall Pipe ROV的出厂验收试验(Factory Acceptance Tests,FAT),该型ROV将部署在DEME即将推出的水下岩石安装船(抛石船)“黄石”号(Yellowstone)上,计划于2024年上半年加入船队。 % d6 [( ^& L6 e: L
(图片来源:SEATOOLS) 6 N o3 T3 `/ A$ Z
09
1 s- O9 |; S+ F2 L8 I FIFISH E-GO观测机器人 # N; [& T2 V5 C; Q" s/ t# {" c
一些公司已认识到AI技术在自主性优化方面的巨大潜力,其中包括水下机器人公司QYSea Technology,他们开发了最新模块化、AI驱动的先进海洋成像和观测机器人FIFISH E-GO。E-GO提供了一系列在水下技术市场上少见的先进能力,它使用可拆卸的电机、照明装置、相机和电池,可轻松更换各种模块,快速恢复可操作性。该特性还允许对组件进行广泛的扩展和定制。E-GO几乎将AI集成到航行器的所有操作上。凭借AI视觉锁定(Vision Lock)功能,它具有高级自适应稳定能力,可以轻松锁定目标物体。E-GO的浮游生物过滤算法也得到了AI支持,可以自动优化视觉效果,执行监测水产养殖、搜救、船体检查等任务,甚至它的激光定标和测量系统也利用AI自动化来提高识别水下结构损伤的准确性和能力。FIFISH E-Go是QYSea公司最强大的专业级水下机器人,目前可用于所有QYSea平台。 [$ A$ l; C1 g( f, Q* B
图9. FIFISH E-Go ROV
2 Z. |8 U& k$ w8 q8 j) s5 x, P (图片来源:QYSEA TECHNOLOGY) " ~4 P4 [1 [; J0 S5 Q3 K
10
5 f: s6 M& I- t& i& @ “鱼鹰”(Osprey)AUV
/ ], \1 b+ B' O/ s# N. j3 y& V$ e8 u Teledyne Marine公司最近推出了“鱼鹰”(Osprey)AUV,这是一种长5 m、直径0.3 m、重400 kg、额定深度1000 m、能以3.5 kn速度航行24 h的航行器。Osprey AUV是在开放式模块化Gavia AUV基础上开发的,它增加了一个高效率轮缘推进器、外部数据吊舱、增容后的电池模块、科学仪器舱、避碰和前视声呐头以及定制化载荷。
) i! ]( Q" X- v
+ Z$ p9 E: a+ b/ T: T$ s" j& F Osprey还可选配姿态、深度和航向(Attitude, Depth, & Heading,ADH)模块,该模块基于Slocum滑翔机成功的浮力引擎和鳍控制器,能够在复杂和强海流环境下工作。与合成孔径声呐(Synthetic Aperture Radar,SAS)相结合的Osprey在数据质量和一致性方面的竞争中脱颖而出。 / D3 ^. W, n2 g! K. g' z$ _6 K
- h0 A/ v3 f, }7 m' x Osprey AUV由5种基本模块类型组成:推进模块、控制模块、电池模块、负载模块、头艏模块(nose module);还有可选的姿态、深度和航向(ADH)模块。每个模块都是可移植的,一旦连接,即可被发现(包括传感器),也可扩展。
4 m9 {2 q2 _. Q
, L0 z2 Y: J$ B' | Osprey AUV结合了高精度测量级INS和用于辅助导航的Teledyne RD Instruments DVL。多种可选的DVL产品能锁定850 m深的海底。通过使用超短基线(Ultra-Short Baseline,USBL)或锚在海底的长基线(Long BaseLine,LBL)应答器(可选),可以在较长的部署时间内进一步保持定位精度。该航行可定制,包括多种可选传感器:SAS、多波束回声测深仪(Multi-Beam Echo Sounder,MBES)、SSS、海底剖面仪(Sub Bottom Profiler,SBP)以及高分辨率相机,激光扫描器和闪光灯。
7 [8 ~- h' \+ g 图10. Teledyne Marine公司的“鱼鹰”(Osprey)AUV % R; e5 Y+ k3 k8 E1 P
随着监测、测量、探索海洋和水道的需求不断发展变化,我们可以期待水下技术和类似上述产品的航行器会不断更新、发展,并将其推向我们认为可能的极限。 5 U6 E! t4 N9 r- Q
END
$ D/ a1 L/ R! k! F% s3 I 本文编译自
/ u7 m# F6 F5 l9 Z, H) R, z 3 G( d* w: @, U: Z% X0 T
Whitehead 编译自 Laurel M. Gallaudet. The Ocean Robot Revolution: Reviewing The Latest In Marine Autonomy Tech. Marine Technology. / l- S! r; F: u4 W, z [
Dec. 2023 ' o1 N1 a0 W5 c( ]/ [3 f; g$ M' `
联系我们 3 X* g' d% N; T/ d
地址:陕西省西安市锦业路96号
1 y1 |) P( ?5 T7 ~* Z* q 电话:029-88327279
$ u( t4 U5 X% t: v 邮箱:bianjibu705@sohu.com 网址:sxwrxtxb.xml-journal.net. E; j+ [) n- }
& G" D5 n# j9 i" R0 q* M4 Q
% @( S* d/ j( l+ P2 H) k
9 Q4 `% t6 X I- G. G9 h) B t% ^4 ^' N- `
| 

