|
* `/ F' S. _ T, x/ I 气候变化与全球变暖归因于大气中温室气体含量的增加。搭载于低成本纳米卫星平台(如立方卫星)上的微型低成本、轻量化仪器,可用于精确测量温室气体浓度。立方卫星通常具有狭窄的视场角,其成本远低于具有宽幅观测能力的昂贵卫星。MeznSat是一颗3U立方卫星,将搭载短波红外微型光谱仪作为其主要载荷,旨在通过1000–1650纳米波长范围的观测来获取大气中温室气体的浓度。该卫星计划于2020年3月发射,是哈利法科学技术大学与拉斯海马美国大学在阿联酋航天局资助下合作开展的科研项目成果。 6 B+ E0 f8 m' m
主要载荷Argus 2000是一种微型、低成本、适应太空环境的短波红外光谱仪。该设备结构坚固,质量不足230克,功耗低于1瓦,具备0.15度的视场角和15毫米的前置光学系统。次要载荷包含一台高清相机,可通过后处理实现短波红外光谱仪数据所需的高精度地理定位。可见光与短波红外波段的RGB组合配置使MeznSat成为独特的立方卫星任务,将生成具有研究价值的数据集,可用于探索利用短波红外数据处理可见光通道的大气校正算法。本文阐述了MeznSat任务的任务可行性、任务分析、设计方案及当前进展。 1 T' [# |- E! j$ A; Q
一、介绍 1 b$ Z% ~8 V. {8 _, V3 t% T
人类活动导致大气中温室气体浓度持续上升,已成为气候变化最主要的驱动因素。气候变化预计将对大多数干旱与半干旱地区的水资源数量及质量产生负面影响。此外,热带与亚热带地区的农业生产力可能普遍下降,相关区域的生态系统和生物多样性也将遭受损害。《2017年阿布扎比环境状况报告》重点指出了气候变化引发的关键脆弱性问题,主要包括:海平面上升导致的沿海洪涝;沿海含水层盐度增加;海洋环境影响;热应力;建成环境受损;极端天气事件(洪水、干旱等)频发;沙尘暴风险上升;以及空气传播污染物(如农药)的威胁。 # `1 t6 u4 K- C6 B
二氧化碳和甲烷是两种最主要的温室气体。尽管甲烷在大气中的存留时间短于二氧化碳,但其单位质量的热吸收能力约为二氧化碳的21倍。这一特性使得甲烷在释放后的头二十年中,增温效应可达二氧化碳的84倍。因此,必须同时对甲烷和二氧化碳的排放进行监测与管控,才能有效减缓气候变化的影响。 1 H6 M' e5 S- F" [' W* f3 Q q
近年来,阿拉伯湾多次发生藻华现象。此类藻华事件可能对阿联酋经济造成重大损害。同时,阿拉伯湾沿岸聚集着全球规模最大的海水淡化厂集群,其中多数位于阿联酋海岸线附近。这些淡化厂提供了阿联酋居民饮用水的重要部分,且其淡化产能持续增长。阿联酋海域藻华事件频发已威胁到淡化厂的最佳运行状态,进而影响该国供水安全。为实现淡化厂的高效运营,必须建立有效的藻华监测与早期预警机制。藻华还会危及沿海水域水质,对公众健康构成威胁。藻类产生的毒素(一)在低浓度时即可导致贝类食用危险,(二)在高浓度时会造成鱼类大量死亡。此外,有害藻华还常引发其他常见问题,包括环境破坏、因令人不适的绿色残留物及刺鼻气味导致的旅游业与商业损失等。为此,需要构建高效灵敏的早期预警系统以支持快速响应。
$ C# R) Q# F6 `/ r1 H/ \% K% x 藻华的形成通常源于营养盐污染——即植物必需营养元素氮和磷的过量输入。这些元素的来源主要包括点源(如污水处理厂排放)、非点源(如化粪池、雨水径流、城市及居住区),以及该地区频繁发生的富含营养盐的降雨或沙尘暴。当水体中氮磷浓度升高时,适宜的温度、光照及低流速条件共同作用可能引发藻华。虽然氮和磷天然存在且为植物必需养分,但其过量输入会导致水体生态严重失衡,藻华即是失衡表现之一。
1 E# _- E1 `' l& K. {6 F 本研究旨在探索短波红外波段(1000–1650纳米)与RGB相机协同传感的性能,通过评估阿拉伯湾沿岸水域营养盐浓度来预测潜在藻华事件,从而为地方主管部门采取预防措施提供支持。相较于单一波长监测,利用光谱特征分析氮含量的方法更为适宜,可有效减少其他混合物质的干扰。目前已有多项成功用于植物氮含量测量的光谱指数,但针对沿岸水域氮含量估算的研究尚不充分。氮指数是通过两个或多个光谱波段(其中至少一个波段与氮含量直接或间接相关)进行稳健光谱变换的成果。常用指标之一是归一化差分氮指数,该指数基于氮元素在1510纳米的吸收特征及1680纳米的参考波段,通过对数变换反射率氮指数构建而成。
5 r$ l% u& C ~) ?& J# c4 B 此外,短波红外波段还能有效实现气溶胶(特别是沙尘)穿透探测。可见光成像仪常难以穿透雾、霾、烟雾及沙尘,而短波红外较长波长在这些条件下具备更强穿透能力,可提供更优质的成像效果。同时,短波红外区域较长波长(>2000纳米)可用于沙尘检测与矿物学信息表征。除上述应用外,短波红外波段还可用于可见光及近红外波段传感器(如MODIS)的精确大气校正。本实验除为立方卫星及阿联酋卫星(如迪拜一号、迪拜二号、哈利法卫星)搭载相机获取的信息提供补充数据外,还能验证相关测量结果。
" y1 }7 L* p' {- \ MeznSat的主要载荷为Argus 2000短波红外光谱仪,这是一种微型、低成本、获太空认证的近红外波段(1000–1650纳米)光谱仪。次要载荷为一台高清相机,可通过后处理实现光谱仪所需的高精度地理定位。可见光/短波红外光谱仪与可见光成像相机协同工作的配置,将生成具有研究价值的数据集,有助于探索利用短波红外数据校正可见光通道的大气校正算法。 , G4 ^& ]& w, M- t2 R: }
MeznSat卫星平台设计包含姿态确定与控制系统、电源系统、指令与数据处理系统、通信系统及结构系统。由于Argus 2000光谱仪视场角仅为0.15度,姿态控制系统需实现优于1度的指向精度。该系统采用三个反作用轮与三个磁力矩器作为执行机构,配合太阳传感器、地平仪及星敏感器进行姿态确定。指令与数据处理系统核心为搭载ARM9处理器的主控板,配备64MB同步动态随机存储器及两张固态存储卡。电源系统包含22片太阳能电池,可提供平均6.5瓦功率输出。卫星通信系统由用于下行链路的超高频发射机、用于上行链路的甚高频接收机及一套可展开偶极天线组成。
4 O6 k- B' g( e" D4 X8 J 相关立方卫星项目包括CANX-2任务与SathyambaSat任务。CANX-2是2006年发射的3U立方卫星,使用同款光谱仪但未搭载RGB相机。SathyambaSat为2016年发射的2U立方卫星,仅搭载ARGUS 1000光谱仪,采用基于磁力驱动的中等精度姿态控制系统。尽管文献记载了多个类似任务,但本研究首次在3U规格卫星上实现短波红外光谱仪与RGB相机、以及精度优于1度的反作用姿态控制系统的集成应用。光谱仪配合RGB相机的主要优势在于提升地理定位精度。
& `. t1 D7 J5 {8 \ 在先期论文中,研究人员概述了MeznSat的初步设计方案。本文详细阐述了最终版MeznSat任务概念、分析过程及设计方案,包括卫星平台的全面介绍。该卫星预计于2020年3月发射进入550公里高度的太阳同步轨道。第二章具体说明任务概念,涵盖轨道分析、有效载荷配置及系统级设计;第三章描述卫星各子系统;第四章总结任务分析;第五章给出研究结论。
3 L3 x8 m* V. c 二、任务概念
3 } I W$ T& u 本节概述任务概念,包括任务目标、所用有效载荷、平台选择、轨道分析及任务操作方案。 : B* I- _4 n0 O% t
01.任务目标 8 q. U) s& B# e3 l1 Z1 x
MeznSat任务目标如下:
3 ?! q4 d* F; K I4 [ 核心科学目标:利用短波红外光谱仪监测大气中甲烷与二氧化碳浓度。
9 N+ N5 b" w3 j7 g9 t 探索性科学目标:研究结合短波红外传感与RGB图像技术估算沿岸水域营养盐浓度的可行性,以预测藻华发生可能性。
3 ]9 I7 A* z+ f( {1 O 教育目标:为阿联酋高校学生提供参与空间任务设计与构建的实践教育机会。 6 k; I$ Q: ]" t% R
02.有效载荷 . F1 A, m1 J/ n" b6 L7 h! f! ~. {3 f
本任务的核心科学目标在于探索短波红外波段(1000–1650纳米)的传感性能,以实现大气中甲烷与二氧化碳浓度的检测。为达成该目标,MeznSat搭载两类有效载荷:主要载荷为短波红外光谱仪,次要载荷为RGB相机。二者结合赋予MeznSat独特优势——在监测温室气体的同时,可通过RGB相机实现地理定位。
5 p1 s# R5 M2 f% T" a5 W 为此选用的主要载荷是Argus 2000短波红外光谱仪(图1)。该仪器为经过太空验证的微型低成本光谱仪,整体尺寸仅4.5×8×8厘米。其工作原理为:入射光经300线/毫米的光栅分光后,投射至256元铟镓砷探测器阵列;该阵列配备帕尔帖冷却器以抑制暗电流。光谱仪工作波段覆盖1.0至1.65微米,在100个光谱通道内实现6纳米的光谱分辨率。Argus 2000可探测光谱范围内的气体包括:氧气(1.25微米)、二氧化碳(1.57微米、1.61微米及2.05微米)、水汽(900微米、1.2微米与1.4微米)、一氧化碳(1.63微米)、甲烷(1.67微米与2.25微米)以及氟化氢(1.265微米)。仪器支持0.5至4.096秒的积分时间可调。
% M$ c4 y% `. @( ? 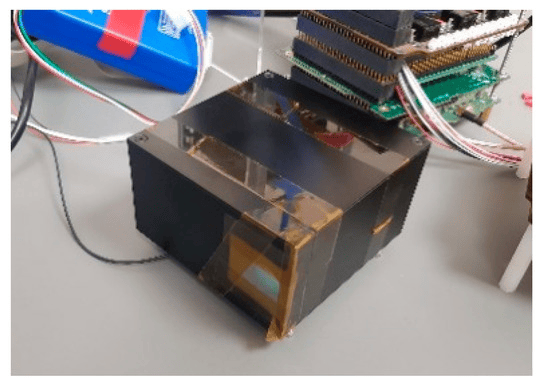
0 T3 r4 J( n' X+ Z) m 图1 Argus 2000光谱仪
5 d' C% @+ d# n2 M2 U Argus 2000的光学系统由望远镜透镜组、视场光阑及主抛物面反射镜(焦距与口径均为35毫米)构成。该系统将地面观测目标的平行光导入每毫米300刻线的表面光栅,经反射光栅进行光谱分光后,由另一反射镜将目标的一级光谱聚焦至铟镓砷探测器。 ( W. S) }3 v, b1 R
! H1 j6 [# f, r6 m' s6 E. ` 星云先进技术有限公司(NAT)是 CubeSpace Satellite Systems中国代理商,我们为客户提供卫星姿态确定与控制设备(ADCS)、反作用轮、精细太阳传感器、星空追踪器等设备与解决方案。
. B" A2 C0 P6 p j9 h9 [' d 次要载荷为基于低压CMOS图像传感器的RGB相机(图2)。该相机由东京理科大学研制,具有丰富的在轨飞行经验。相机采用豪威科技OV-9630图像传感器,通过微芯PIC单片机实现图像传感器与星载计算机的接口通信,配备通用异步收发器用于与星载计算机的数据交互。相机支持拍摄SXGA(1280×1024像素)与VGA(640×480像素)两种分辨率图像。其封装尺寸为45×46×15毫米,质量39克,总功耗0.11瓦。 ) k) |' F5 _. W+ F
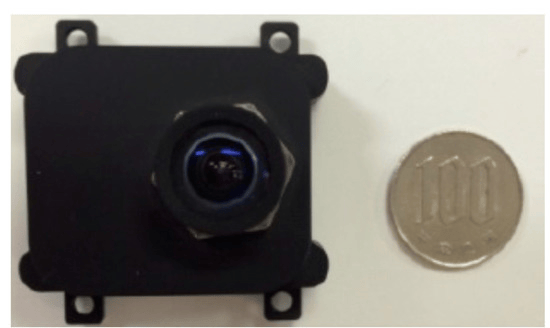
Z5 r6 d4 F) i5 O* \# V% I5 C 图2 MeznSat搭载的RGB相机
6 I% K% L: f- I# I 03.平台选型
Y2 d6 k! E, D 通过对卫星平台可选方案的深入研究,确定满足本任务需求的最小配置为3U立方卫星构型。如图3所示,3U构型的体积相当于三个1U立方卫星,其标准尺寸为34厘米×10厘米×10厘米。该决策的主要依据在于平台需容纳所有必要子系统的内部空间需求。Argus 2000光谱仪的狭窄视场角要求卫星具备精确指向能力,因此需要占用至少0.8U体积的精密姿态确定与控制系统。有效载荷预计需占用1U空间,综合考虑最终决定采用3U平台作为MeznSat的卫星构型。
& @" L; J' M/ G. N+ z3 r 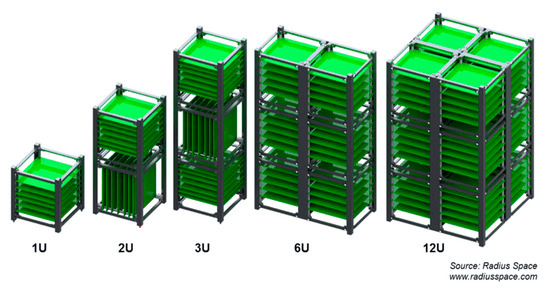
9 M, p1 R9 z1 l4 W: `5 l& A- h- d 图3 不同立方卫星平台示意图 + ~+ O/ t6 _! n
04.任务操作方案 7 v, {! G$ o# w D; [) O! }
MeznSat任务操作方案如图4所示。在卫星寿命周期内,系统将主要运行于五种工作模式。发射与早期校验阶段将执行标准操作程序,包括天线展开、消旋控制及信标传输。此外,初始校验模式期间将对所有子系统进行功能正确性验证。
+ w; P$ | E& _8 A7 G" A" p* u 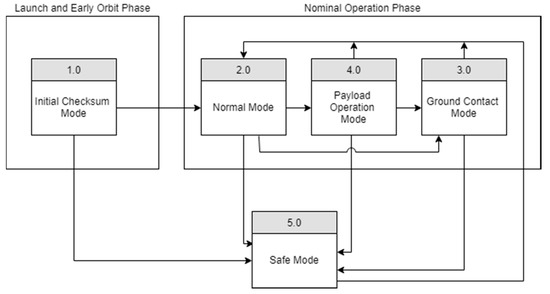
% g5 |+ F4 H& D7 W3 ^) H3 a6 W
图4 MeznSat整体运行模式示意图 ) B3 q1 `/ S8 M, |2 s/ ^$ @; E) d
常态运行阶段执行卫星的主要任务操作,包括有效载荷工作。正常模式是卫星在寿命期内主要运行的模式,此期间将监测所有子系统组件状态、采集遥测数据,并定期发送信标。若出现故障或异常,卫星将进入安全模式。图像采集与存储等特定任务在有效载荷模式下执行。当卫星进入地面站通信范围时,将切换至地面联络模式,此时卫星将发送实时数据并接收与执行指令。 / ]9 ]! S% o( d5 ]& b
三、系统设计与平台子系统 7 n" n& K: n3 g% C
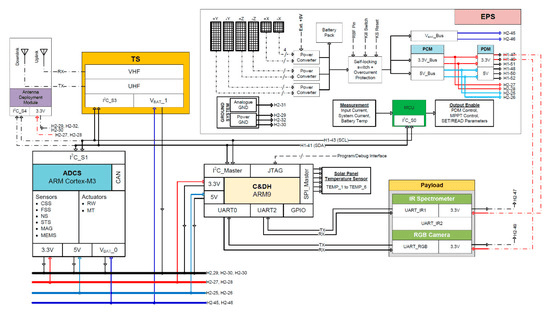
本节阐述MeznSat的系统级设计,并概述星载各子系统。卫星平台设计包含五大支持任务有效载荷运行的子系统:电源子系统、姿态确定与控制子系统、指令与数据处理子系统、通信子系统及机械结构子系统。MeznSat整体系统级框图如图5所示。 2 c6 U- [2 ~, {" w4 D
, B2 ~$ _9 M# R9 S
图5 MeznSat系统架构 ( v7 I e& b/ x0 ~; x; z+ s
01.机械结构
( _; @' j. X3 F5 S- X c 机械结构采用基于ISIS立方卫星标准的3U模块化构型。该结构由三个1U印刷电路板堆叠模块组成,这些模块被集成在次级结构框架内,形成承载电路板堆叠的机械底盘(如图6所示)。
- z! \8 l4 w0 P8 i! t" f8 M9 ^ 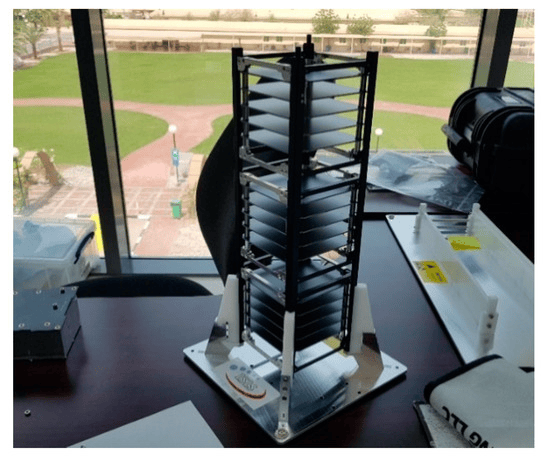
. D0 @% I1 a" Q% F- S* E
图6 MeznSat机械结构
( U# x% F& y- l8 m9 ~) I1 V 02.通信子系统 $ k: u7 {6 M$ g4 J* u
通信子系统由超高频发射机与甚高频接收机组成,配备四根可展开偶极天线分别用于超高频与甚高频频段。该收发系统负责卫星与地面站之间的上下行链路通信。
) n/ U& R1 _: a& L2 _9 j5 } 超高频发射机用于将遥测数据、科学数据及图像数据从卫星传输至地面站,采用二进制频移键控调制技术,以9.6kbps速率在430MHz至450MHz载频范围内进行传输。
) o6 q$ I% [+ E7 v 表1展示了有效载荷产生的数据量。其中RGB相机生成的数据量占比最大,SXGA格式图像与VGA格式图像分别产生1,643,530字节与389,130字节数据量。若以下载SXGA格式图像计算,使用9600bps超高频发射机需22分钟完成有效载荷数据下载。卫星工具包仿真验证每日地面站可访问时间总计28分钟,可用于数据下行传输。需说明的是,此计算未考虑星载图像压缩技术的应用。
, B+ F( o% @1 Q2 g4 S 
, O/ h3 g9 f9 u+ e, l8 M 表1 任务有效载荷生成数据量 ' A: C2 A+ R+ x
甚高频接收机负责接收地面站发送至卫星的遥控指令。该接收机采用音频频移键控调制技术,以1.2kbps速率在130MHz至150MHz载频范围内工作。
* o% \$ \& `( j: A$ x; |. { 03.姿态确定与控制子系统 . E9 q, l, z8 G. F
姿态确定与控制子系统负责在整星任务周期内控制卫星指向,包括:卫星入轨后的消旋控制、根据任务需求调整卫星指向、以及从异常旋转状态中恢复稳定。由于本任务主要载荷光谱仪的视场角仅为0.15度,且需实现对温室气体排放源的较精确探测,系统需达到优于1度的指向精度要求。这意味着立方卫星通常采用的基于磁力矩器的被动姿态控制机制已无法满足需求,必须使用反作用轮配合精确姿态确定传感器(如星敏感器)的方案。 ) S. M/ b# f: [! j
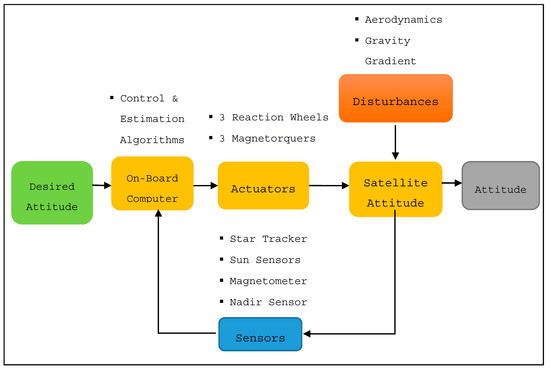
本任务采用的姿态确定与控制子系统是CubeSpace公司提供的三轴集成套件CubeADCS,其除星敏感器外各组件均具备十年以上在轨飞行经验。图7展示了该子系统架构概览,图8为硬件实物图。该系统具备三轴控制能力:配备三个反作用轮(最大角动量1.77毫牛·米·秒,最大扭矩0.23毫牛·米)及三个磁力矩器(主要用于动量轮卸载)。传感器组包含:可展开磁强计、两个CMOS相机(分别用于精细太阳方位检测与地平线识别)、十个粗太阳敏感器,以及基于ARM Cortex-M3架构的星敏感器。 / P* m2 k4 `7 q! U
# l: D% M! q( K% a L. K2 b
图7 MeznSat姿态确定与控制子系统架构 , M6 q, \" a! s- j% I

4 o' _! r: P, u/ R; w
图8 CubeADCS集成模块(左)与星敏感器(右)
( \1 c5 o: P& t1 j! } 图9展示了MeznSat完整的姿态确定与控制子系统工作模式序列。根据立方卫星规范文件要求,卫星从部署器弹射后预计将产生最高10度/秒的旋转速率。在“无控制模式”下,姿态确定与控制子系统不执行主动控制——规范文件明确规定卫星在部署后30分钟内无需执行任何操作。随后,MeznSat将进入“消旋/姿态捕获模式”,该模式旨在将卫星旋转速率从最高10度/秒降至3度/秒以下。在与地面站建立通信后,将展开磁强计。由于展开动作的影响,Y轴角速率可能上升,此时Y轴汤姆逊控制器将降低X轴与Z轴角速率,并将Y轴角速率控制在1度/秒以下。在有效载荷工作期间,XYZ反作用轮模式将启动运行,将角速率进一步降低至0.03度/秒以下。 2 s- J5 Z- C; } y! a2 X, q

$ b3 t, @. y; x" S; j
图9 MeznSat姿态确定与控制子系统工作模式 + p7 y0 e+ m& ]
各模式间的转换均自主完成(除磁强计展开与Y轴汤姆逊旋转控制需地面指令外,无需人工干预)。唯一的例外情况是当卫星需从“安全模式”恢复至其他模式时,仅能根据卫星角速率参数在地面站指令控制下进行模式切换。 ! U) R# O7 w7 B- n: U3 d1 f
04.电源子系统 # ~# a d! V& N G1 F
电源子系统为航天器各子系统提供电力支持,确保卫星在整个任务期间正常运行。该系统包含三个主要组成部分:太阳能电池板、蓄电池及配电系统。针对太阳能电池板配置曾考虑多种方案,其中最重要的两种方案是固定式与侧向展开式太阳能板配置。虽然侧向展开式配置能显著提升发电功率,但根据功率预算估算(典型值6.24瓦时,最大值7.33瓦时),固定式太阳能板配置已能满足任务需求。整星共采用22片太阳能电池,其结构周向分布如图10所示。电源系统还配备能量密度达38.4瓦时的锂离子电池组,该配电系统可在不影响有效载荷运行的前提下完成锂电池充电管理。
4 q, K# c2 ?: X1 ~6 h 图10 卫星结构表面太阳能电池分布示意图:(a)+Z轴面;(b)+Y轴面;(c)-Z轴面;(d)-Y轴面;(e)+X轴面;(f)-X轴面 2 l5 y8 |* _! q; P/ a) r$ C
05. 指令与数据处理系统 2 l, p, D9 x# O) c% g
指令与数据处理系统负责运行飞行软件并处理卫星平台所有数据。该系统的核心组件为星载计算机,其采用400MHz主频的ARM9处理器,配备64MB内存、1MB NOR闪存(用于代码存储)、256KB铁电存储器(关键数据存储)及两张2GB容量的微型SD卡。系统采用I2C作为卫星平台的主通信总线,星载计算机与有效载荷之间的数据传输则通过UART接口实现。 ' c8 w# D1 _( J0 i- I) \
06.飞行软件
1 Z, Z; d0 Q$ f9 ?8 P, w 卫星飞行操作软件采用分层架构,如图11所示。架构最顶层为任务软件层,负责执行MeznSat的专属任务程序。考虑到其轻量化、实时性及易用性优势,本任务选用FreeRTOS作为核心操作系统。硬件抽象层包含所有硬件专用驱动程序,并集成具备故障保护机制的FAT32文件系统。
9 ]! [6 i* k: n- P# N" G3 k 图11 飞行软件层次结构
7 ~+ r J9 K& Q( y3 `" E0 Q MeznSat的软件任务被划分为四种类别:
( p7 p& {/ I" V3 H/ k3 D (1)周期性运行任务:包括需要按固定时间间隔从各子系统采集数据的任务,例如遥测数据采集任务与信标传输任务。 * [0 m& ]/ x, ~7 ?. M) o
(2)时序触发任务:指需要在特定时刻执行的任务,包括地面联络任务与有效载荷操作任务。 . X% e3 V0 w, K g; T3 d% U
(3)持续运行任务:当任务延迟结束后,若其在就绪任务池中优先级最高,则进入运行状态。此类任务包括姿态确定与控制任务与正常模式任务。 ! P4 h5 M L, o) z( ?* Q8 w
(4)事件等待任务:此类任务需等待信号量触发或队列数据就绪,包括文件管理任务、指令执行任务、安全模式任务及初始校验任务。
& o( E K& K; z$ [: b- p MeznSat软件的整体架构如图12所示。 # T8 T' i5 d8 P6 w5 Q) @1 N& [3 A7 q' C
图12 MeznSat软件模块框图 - ^: @+ b: |: h/ U! ]
07.大气/地表状态反演算法
* Z% o& I4 B* n1 N Argus 2000光谱仪的观测数据构成单个探测单元,在550公里轨道高度上对应的地面采样范围约为1.5×1.5公里。每个探测单元将通过反演算法进行分析,通过调整未知的大气、地表及仪器参数来拟合实测光谱。反演算法包含两个核心部分:前向模型与统计比较方法。前向模型是描述大气辐射传输、地表反射以及仪器对入射辐射影响的近似计算方案,用于生成详尽的查找表。前向建模将采用为CANX-2任务开发的辐射传输建模工具GENSPECT软件完成。
& F% c, x" Y, B M5 j 图13以示意图形式展示了反演算法的主要特性与流程。反演过程的第一步是输入假设的环境状态参数,包括地表压力、地表反射率、垂直温度廓线、主要气体混合比、水汽及其他痕量气体浓度,以及云与气溶胶光学厚度分布。这些参数可通过已知气候学数据及其他卫星数据产品(如MODIS的地表反射率、云与气溶胶光学分布数据)进行初始化。该信息将与预先编制、具有波长依赖性的气体、气溶胶及云光学属性表相结合。光谱范围内的气体吸收截面数据通过GENSPECT软件及HITRAN等谱线数据库计算并制成表格。生成的合成光谱经太阳模型与仪器光谱响应模型处理,最终生成可直接与校准光谱进行比较的结果。
" a T. o( P+ h. d* |2 l% _. a 图13 大气/地表状态反演算法示意图
3 F" N$ r7 P5 x+ \+ H 比较模型将合成辐射光谱与观测数据进行比对,采用最优估计技术实现在光谱范围内与实测光谱的最佳匹配。最终通过统计验证的最优匹配大气状态,反演出大气成分。
( x" }0 T/ _5 s3 q8 K 为验证结果,将采用全球总碳柱观测网络提供的数据进行比对。卫星将采集观测站上空的对应数据,并选取卫星过境时间前后30分钟内获取的地面观测数据进行对比验证。同时,将使用便携式短波红外光谱仪在阿联酋光谱均匀的沙漠区域,通过系统采样匹配地面采样距离的方式,精确测量地表及下行辐射的光谱特征。该数据将用于验证仪器性能,并在必要时进行重新校准。 , C& x! D3 `, V# H2 e) k
四、任务分析结果
, z- c/ ?! ?. k/ ?$ S( F) O7 K 01.轨道分析 % k' A9 S8 R/ y
MeznSat的轨道需求分析综合考虑了以下因素: . y/ i U1 N7 h, Z( R; |5 [
轨道寿命:任务发起方要求的最低在轨工作寿命为三年。 0 H5 ~! s' u8 R( G9 o- E
覆盖时间:利用位于阿布扎比哈利法大学的主地面站与卫星进行通信的时机。 3 }" ^& P" F. ]/ }+ \
重访周期:计算卫星每日对阿联酋地区的重访频率。 % z3 e0 t9 E) d, C" W) x1 p* h
有效载荷工作时机:获取阿联酋区域影像数据的机会。
" t9 C' ~# A1 N3 R 所有轨道分析均采用系统工具包软件完成。图14显示,在满足最低三年任务寿命要求,且符合机构间空间碎片协调委员会关于卫星须在25年内陨落的指导原则前提下,45公里至600公里的轨道高度范围均可满足任务寿命需求(图中橙色椭圆标示区域)。 9 m8 x0 o r( ? X% g' z1 k
图14 MeznSat寿命分析 8 S; y0 I* j# p# V
02.有效载荷覆盖范围 7 f+ v6 t8 L, N7 K
为验证卫星对阿联酋区域的覆盖能力,研究人员开展了有效载荷覆盖分析。图15所示的覆盖分析基于传感器仅在工作日上午8时至下午5时进行观测的约束条件。在系统工具包软件中,网格区域根据有效载荷可捕获的1.5公里×1.5公里地面采样距离进行设置。分析结果表明,在卫星仅采用天底点指向姿态的条件下,为期三年的任务期间光谱仪可覆盖阿联酋总面积的46%。 ! [- F( K5 V: ~. T' X2 n. V
图15 光谱仪36个月工作周期的足迹覆盖分析
1 T) p1 u- Y+ e6 h7 `- e# K6 m3 @ 对于轨道高度550公里、倾角97度的太阳同步轨道,卫星与地面站的平均单次联络时间约为10.40分钟。
# @6 A7 x @& G* Q. b' ` 03.体积、质量与功率分析
7 ]4 u, s9 s) @& b5 B* r' Y5 t 能否将卫星各部件和子系统集成至3U空间内,是制约任务可行性的关键限制因素。图16展示了MeznSat的内部系统布局与组件排布方案,所有子系统均适配可用的3U体积空间。在主体结构建造期间,研究人员通过3D打印结构进行了适配性检验,确认所有组件均可按计划安装就位(图17)。 " b$ E) o/ z1 ^
图16 MeznSat内部系统布局
r" m/ M. V+ S" l( x9 F 图17 采用3D打印结构的适配性检验:底部2U结构检验(左)与顶部1U结构检验(右)。 7 o! G4 p' [6 |+ n/ T. N
MeznSat的质量预算如表2所示。计算结果表明卫星总质量为2966克,相对于立方卫星标准规定的最大质量4千克,其质量余量达到26%。 / V' v" d c& b! k7 h! C
表2 MeznSat质量预算
; R1 P* J4 k' F 图18展示了卫星单轨运行周期的模拟功率曲线。图示表明功率状态良好,预期蓄电池最大放电深度为5.5%。图中分别显示了发电功率、耗电功率(基于任务功率预算)及蓄电池状态曲线。
, N6 }0 f7 ]0 A* O/ X7 [ 图18 单轨道周期功率分析 % s% U8 b+ T/ e4 m4 F# Q) V$ d4 ?8 ?
04. 姿态控制分析
: e: q# v2 K, P& G1 r 卫星与运载火箭分离后,部署机制将使航天器产生约10度/秒的旋转速率。需通过消旋控制将所有轴向速率降至3度/秒以下,以便后续展开磁强计。在消旋模式下,为降低各轴向角速率,将启用Y轴磁力矩器与XYZ轴速率传感器,实现B点控制模式与微机电系统速率估计模式。研究人员采用EOS软件对姿态确定与控制子系统的消旋功能进行了仿真验证,结果如图19所示。如前所述,Y轴汤姆逊控制器将降低X轴与Z轴角速率,并将Y轴角速率控制在1度/秒以下。图20展示了姿态确定与控制子系统在Y轴汤姆逊模式下的仿真结果:系统从初始3度/秒状态到实现1度/秒控制精度需时3分钟。尽管已完成更详尽全面的姿态确定与控制子系统分析与仿真,但其内容超出本文论述范围。
, W$ i* @; y1 e1 {" o 图19 消旋模式运行结果 * ]. v$ l0 ]! ^( m
图20 Y轴汤姆逊控制器姿态控制系统仿真结果 / C/ M9 ^$ x% @7 S+ Q; Z1 [( s
05.热分析 : k4 d% H9 I5 q: F0 N3 G
采用西门子NX软件开展了有限元热分析。结果表明所有组件(包括有效载荷和蓄电池)的温度均处于正常工作温度范围内。后续将通过热真空舱开展全面热测试以验证仿真结果。
6 ~- ?( [3 C2 f9 V& \ 五、结论 2 s: V, f8 _+ d0 F: r" J& m: q
MeznSat是一颗3U立方卫星,创新性地将短波红外光谱仪与RGB相机结合,用于监测大气中温室气体浓度。其有效载荷包含短波红外光谱仪与RGB相机协同工作,以实现高精度地理定位。仿真表明,在三年的任务周期内,通过姿态机动可实现46%的有效载荷覆盖范围。本文论证了在当前各子系统技术水平下,实现任务目标的最小可行平台为3U构型。 ; a& r6 t t& e# J8 L! u
平台可用体积是本任务面临的主要限制因素。由于各组件(特别是有效载荷与姿态确定与控制子系统)的尺寸约束,实现最优卫星内部配置设计具有挑战性。质量预算显示存在显著的质量余量,功率分析则表明系统具备健康的功率曲线,能够应对电力系统的额外压力。 3 l9 }' C& Y! y
光谱仪的小视场角要求配备高精度姿态确定与控制系统,需采用反作用轮作为执行机构,配合太阳敏感器、星敏感器及磁强计进行姿态感知,以实现1度的指向精度要求。姿态确定与控制系统的仿真结果显示了符合严格任务要求的适用性能。 . l3 k2 C4 z7 ]4 Z; R3 m) R3 h
综上所述,本文通过质量、体积、功率、寿命、有效载荷覆盖范围及指向精度等分析,证明该任务在紧凑的3U平台中独特地融合了短波红外有效载荷与RGB相机,具备可行性。MeznSat计划于2020年3月发射进入550公里轨道。 " [8 v' T5 b8 A _2 W! m$ \. j
星云先进技术有限公司(NAT)是CubeSpace Satellite Systems中国代理商,需要卫星姿态确定与控制设备(ADCS)、反作用轮、精细太阳传感器、星空追踪器等设备与解决方案请立即联系我们。 , T: k; r! b4 G& }
返回搜狐,查看更多 8 D+ e" p) N0 C+ u" C: r0 t/ g
9 h# Y, P2 P* q, @5 _
1 c8 A8 `, K+ k8 R
2 l: {6 _( ~) f* ^- P( Z. ?' W
. s) H `% N6 ?! q7 p u | 












