登录

无处藏身:世界各国水下分布式监视网(上) 编译 Whitehead 本文编译自:Anika Torruella. Nowhere to hide: Undersea networks target the challenges of the deep. Janes International Defence Review. December 2021
分布式水下网络和海床作战可利用浅海和深海资产构建水下图像,揭示出比想象中更多的水下环境信息。Anika Torruella(原文作者)研究了更高的海洋“透明度”对核威慑及水下战的影响。 文中概述了美海军“水声监视系统”的发展历程,着重介绍了美海军“经济可承受的机动式ASW监视系统(Affordable Mobile ASW Surveillance System,AMASS)”和“持续浅海水下监视网(Persistent Littoral Undersea Surveillance Network,PLUSNet)”,继而介绍了美军针对安静型潜艇所带来的非对称威胁而开发的“分布式敏捷猎潜”等无人系统以及“海基物联网”项目,以实现大视场、广海域态势感知。随后,本文又分别介绍了欧盟、澳大利亚、中国和俄罗斯在水下监视系统方面的最新进展,从而为读者呈现出了一幅完整的全球水下监视立体图景。 未来的水下舰队和系统必须要考虑到日益增强的颠覆性互联能力,从而发展合适的对抗手段措施。 一种新的水下战形式正寻求创建由无人载体、水面和水下传感器、以及通信和能源节点组成的分布式网络。这些遍布各处的海上战斗网络(battle network)将对能进行长期水下监视的大量小型海上节点进行更大规模的指挥控制(C2)。其它任务功能包括:为反潜战(ASW)探测和跟踪潜艇,对水雷和其它爆炸物进行定位以辅助反水雷(MCM),识别恐怖主义事件、沿岸入侵、甚至舰船或部队的弱点或缺陷等。 在现代战争中,“感知-决策-响应”链以赛博速度运行,人工智能(AI)驱动的分析和人-机团队正在追求主导信息战,打击速度和距离正随着可获取数据的速度和数量的增长而增大。这些军事思维的颠覆性转变与19世纪50年代推动核优势的第一次抵消战略或19世纪70~80年代期间因制导弹药和战斗网络获得军事优势的第二次抵消战略完全契合。 当美国国防部(DoD)在2014年开始考虑第三次抵消战略时,AI和自主系统、人-机团队协同战斗网络被认为是加快作战节奏、创造适应性和灵活性的关键。海军正在寻求这种新型战斗网络,它将能够在水下无处不在、到处渗透,以取得优势,提供超分布、灵活、致命性的海军兵力。 水下情报、监视与侦察(ISR)任务在传统上由有人平台承担,例如猎雷或扫雷舰艇实施MCM,或派海军蛙人对舰船和码头进行水下检查。无人海上系统(UXVs)已经进入了视野,将成为战区中识别和分类行动、数据收集、ASW和MCM的中坚力量。UXVs作为舷外传感器,可使母平台及舰员保持在雷场之外,从而降低人员的风险。在相互合作的自主集群中,多个承担不同角色和职责的UXVs相互通信和交互,可帮助有人平台摆脱更多的任务负担和风险。 这已被证明是一种力量倍增器,特别是在难以抵达和/或在反介入/区域拒止(A2/AD)的区域进行数据收集。自主和机器学习平台正不断提高无需人工干预而进行决策的更复杂行为和高级使命任务能力,机器编队协作也能在无人工干预条件下进行持续控制。随着水下和水面机器人成为态势感知、海洋调查和海底测绘的不可或缺的工具,军工联合体正日益关注多无人载体的互操作性、有人和无人编队的联网需求、以及加固安全系统的硬件和软件等问题。 分布式海上网络已不再是新概念。19世纪50年代中期,美国海军(USN)在水下安装了“水声监视系统”(Sound Surveillance System,SOSUS),目的是识别和监视ASW威胁。SOSUS由布设在大西洋和太平洋海底的固定式被动水听器阵构成的水下声学网络所组成,以提供探测能力。它能远程探测潜艇产生的低频噪声,这是因为低频声衰减小,能在海中传播很长距离。SOSUS的固定式水听器阵监听和记录水下噪声数据,然后通过海底电缆发送到岸站,再由岸站进行分类和定位分析。随后,前苏联也研制了类似的系统,如Amur(19世纪50年代)、Liman(19世纪60年代)和Dnestr(19世纪70年代)系统。 19世纪90年代,SOSUS解密,并被集成到更灵活的“集成水下监视系统”(Integrated Undersea Surveillance System,IUSS)中。IUSS与“水面拖曳阵监视系统”(Surface Towed-array Surveillance System,SURTASS)平台一道,时至今日仍在使用。
图1 SURTASS最初是为了弥补SOSUS的不足,安装在T-GAGS系列水声监听船上,包括“胜利”(Victorious)级监听船“能干”号(Able,T-AGOS 20),靠船艉拖曳的水下SURTASS阵收集水声数据。 到1998年,USN的“海网”(Seaweb)项目已开发和测试了一个大规模水下传感器网,并由位于圣迭戈(San Diego)的美国“太空与海战系统中心”(Space and Naval Warfare Systems Center)主持了一系列年度实验,目的是为建设水下无线网而不断推进遥控声呐的水下信号发射和测距技术。于2001年7月在印度洋举行的“舰队战斗实验”(Fleet Battle Experiment)中,一个15个节点的Seaweb网已能实现攻击型核潜艇和固定的、可布放式自主分布式系统间的异步联网。在2004年的“海鹰先期概念技术演示验证”(Sea Eagle Advanced Concept Technology Demonstrator)项目期间,Seaweb的试验已经演示了海洋学传感器、中继转发器、特战部队、自主水下航行器(AUVs)、多介质网关浮标以及机动式水面站之间的水下通信网络。 AMASS项目 2020年,美国海军研究办公室(Office of Naval Research,ONR)在公告(Braod Agency Announcement,BAA)中征集深海环境下远程ASW的革命性建议。所提出的“经济可承受的机动式ASW监视系统”(Affordable Mobile ASW Surveillance System,AMASS)项目的目的是“设计、构建、演示验证和生产一种能在大范围内探测新型潜艇威胁的长期深海主动ASW系统”。AMASS的研发目标是:对已有的固定式监视系统和机动式监视系统进行扩展,为战区ASW指挥官提供灵活、响应迅速的广域监视能力。 AMASS海上感知系统的技术需求包括:主动和被动声呐性能、自动部署、持久性、位置保持和寿命等。根据BAA,USN对AMASS的需求是:经济上可承受,能够从船运集装箱中自动布放浮标式大孔径声呐阵,浮标能够依靠动力在一定位置上长时存在,基阵的变形最小且不会影响声呐性能。AMASS似乎也是对SOSUS和其它美国水下固定和机动式监视系统的补充。 这些先进水下分布式网络演变的催化剂是:改进的自主性和机器视觉(可完成更复杂的任务)、大数据解决方案和机器深度学习(已越来越多地用于自动信号分析和处理)、边缘计算(数据在靠近数据源的网络边缘进行处理)、以及微型化和加固技术。 由于海水中不可预测的波动和剧烈的温度变化,水下环境十分恶劣,且有腐蚀性。尽管用于海床战的系统组成单元不仅必须保持水密,也必须能够承受巨大的水压、战斗冲击(battle shocks)、以及导致军事电子系统性能降低、失效、甚至损毁的振动(特别是在较长时期内),但尽可能在海床上实施机动作战能带来许多好处,包括降低敌方和太空资产的“能见度”。材料科学已经使小而紧凑的电连接器的灵活性、耐用性和数据吞吐量大大提高。此外,无人系统的扩散也为适合于各种海洋环境和任务的平台选择提供了丰富的机会。 PLUSNet系统 2015年,美国“持续浅海水下监视网”(Persistent Littoral Undersea Surveillance Network,PLUSNet)的目标是建立一个能在浅海环境下持续自主探测、分类和跟踪舰船和安静型柴电动力潜艇的可控网络,以提高浅海监视能力。它使用固定式和机动式水下平台,包括配备探测系统的海底节点、配备拖曳阵的无人水下航行器(UUVs)、以及配备声学和环境传感器、浮力驱动的Liberdade PLUSNet水下滑翔机。 PLUSNet是由ONR和美国国防先进研究计划局(DARPA)主持、宾夕法尼亚州立大学牵头、耗资0.277亿美元的3年项目。该项目展示了各种无人系统,如:Bluefin Robotics公司的“奥德赛”(Odyssey)AUV,Kongsberg公司的水下滑翔机,Teledyne Webb Research公司的“斯洛克姆(Slocum)”水下滑翔机,宾夕法尼亚州立大学的配备有大型UUV被动阵微型调制解调器的“海马(Seahorse)”AUV和Liberdade公司的XRay水下滑翔机(也配备了微型调制解调器)等AUVs,以及其它固定式或漂流式传感器。
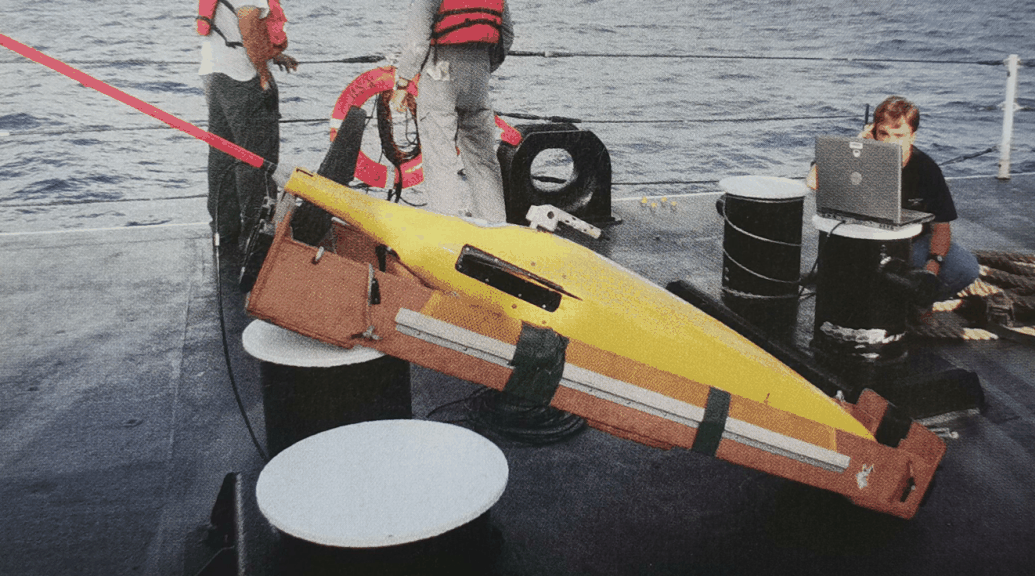
图2 在ONR和DARPA主持的3年期PLUSNet项目期间,水下滑翔机执行水下平台的探测任务。 对PLUSNet这类分布式联网系统中每个组成单元的基本要求是,能够进行通信,从而具备组队/建立蜂群的能力。在特定水下环境限制下,在大量“智能”(smart)传感器和装置、数据存储和处理设备、以及处于战场边缘甚至远至岸上设施的互联节点之间实现信息共享,是一项具有挑战性的任务。由于电磁波在水中的衰减和声谱可用带宽的限制,利用对水下资产遥操作所需的带宽进行无线通信在很大程度上是不现实的。 正在创建的任何分布式水下网络项目中使用的传感器可以包括:磁力仪(能检测到周围磁场的微小变化,暴露深海航行潜艇的非声行踪)、重力仪(能探测到地下或水下自然资源或物体,如简易爆炸装置或其它爆炸弹药)、压力或尾流探测器(可识别潜艇留下的湍流、涡流和浅海内波,以及辐射和化学尾迹)、以及其它类型的光电/红外装置。此外,自主平台不仅要承担执行器(actuators)的任务,也要承担移动通信和传输节点的任务,从而可将网络与广域防御信息栅格相连。 水下“透明度” 跨区水下系统的分布式网络能够建立更高的全球水下“透明度”,类似于卫星成像技术在过去一段时期的发展演变——增加了地球表面的成像分辨率,包括对军事力量运动和定位的成像。虽然这将彻底改变水下战,但它也与当前潜艇部队的作战概念(CONOPS)和隐蔽打击任务角色有冲突。安静型潜艇传统上一直是非对称威胁。为降低这种威胁,DARPA从2013年开始,先后开发了“分布式敏捷猎潜”(Distributed Agile Submarine Hunting,DASH)无人系统、“可靠声路径转换系统”(Transformational Reliable Acoustic Path System,TRAPS)和“潜艇风险控制”(Submarine Hold at RisK,SHARK)UUV。 DARPA称,DASH项目开发了“深海声呐节点”,从而构建可在大洋大深度工作的协同传感器平台,利用这些节点可实现大视场探测潜艇。 DARPA解释道:“每个深海节点相当于一颗海洋卫星,被称为subullite”。对于大面积、更浅的大陆架海域,DASH采用基于非声探测技术的分布式机动传感器。 DASH开发了两个原型系统:第一个系统是与美国“莱多斯”(Leidos)公司合作开发的TRAPS,它是一种固定式被动声呐节点,目的是利用在深海海床上工作的优势来实现大范围覆盖;第二个系统是SHARK UUV,它是一种机动式主动声呐平台,用于在初始探测后跟踪潜艇。4月宣布了最新的与TRAPS相关的合同,该合同包含在美国对外军售(US Foreign Military Sale)项目中,其中84%的工作将在日本横滨完成。
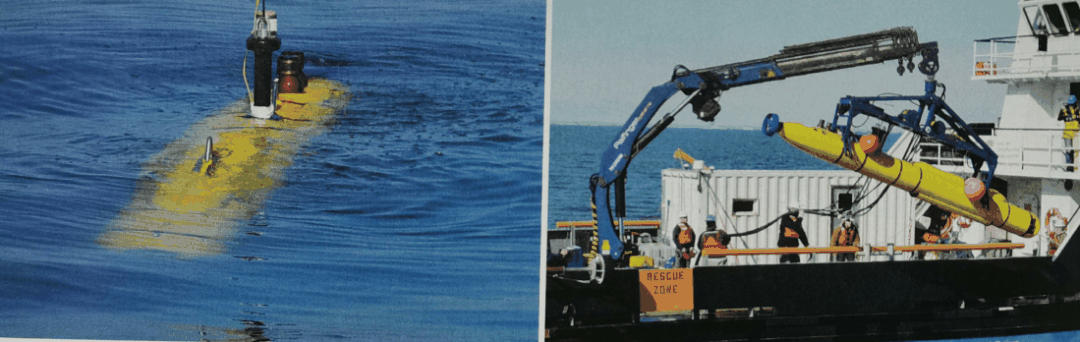
图3 SHARK UUV是DARPA的“分布式敏捷猎潜”(Distributed Agile Submarine Hunting,DASH)项目的关键组成部分,该项目的目的是开发合作式深海声呐传感器平台,为ASW实现大视场感知。 分布式水下网络也可能促使主要关注大型平台的海军舰队发生转变,这可能对日益被高成本的舰船开发和生产问题所困扰的USN特别有吸引力。 USN的一些新的造舰项目,如:“福特”(Ford)级航母、“朱姆沃尔特”(Zumwalt)级驱逐舰、以及“自由”(Freedom)级和“独立”(Independence)级濒海战斗舰(LCSs),已经历了研制问题和由 |